Multi-sensor information fusion robot pose measurement method and device
A multi-sensor and measurement method technology, applied in two-dimensional position/channel control, instrument, non-electric variable control, etc., can solve the problems of large error of multi-sensor information, large operation deviation, and inability to achieve excellent practical performance , Strong degree of automation, novel design effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
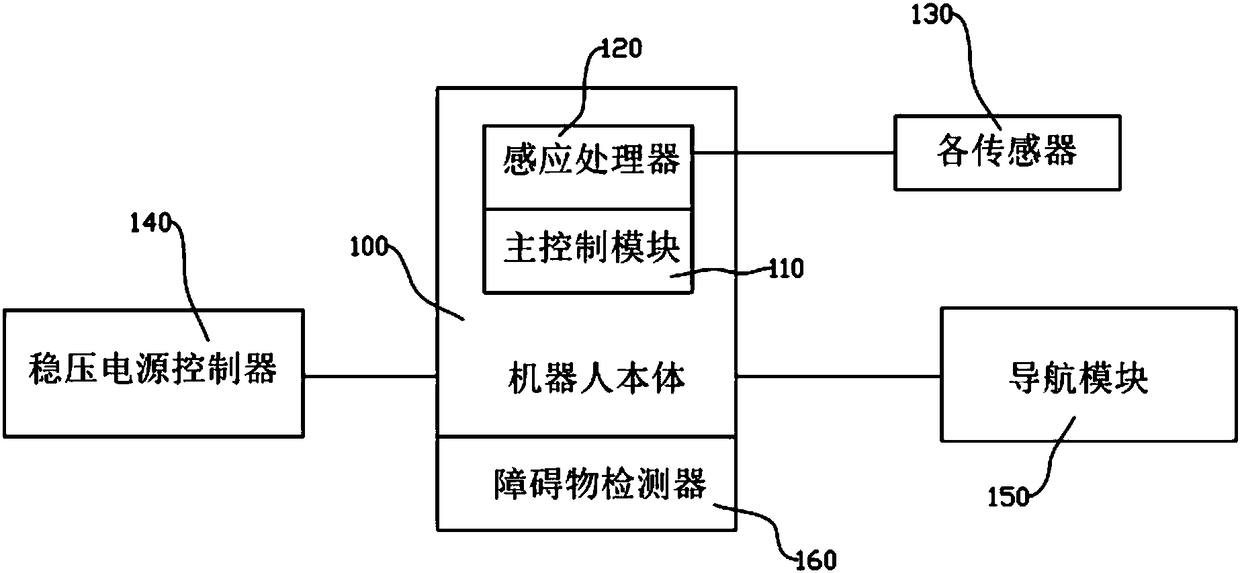
[0017] A multi-sensor information fusion robot attitude measurement method, including obstacle detectors, various sensor systems, ultrasonic sensors and infrared sensors are used when the obstacle detector detects data, and the information is fused using the data fusion method of the expert system. The database is composed of the information obtained by each sensor, and then the first-level rule base is designed. This rule base judges the distribution of obstacles in the area around the robot based on the data in the database. After the robot avoids obstacles, it needs to adjust its position so that the robot’s The direction of movement returns to the direction before avoiding obstacles, such as turning left, and when there are no obstacles on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com