

Flexible mechanical arm control simulation platform and simulation method thereof
A flexible manipulator and simulation platform technology, applied in the field of mobile communication, can solve problems such as complex operation logic, difficulty in parameter setting and modification, and difficulty in analyzing pure data records, so as to shorten test time, avoid waste of resources and design The effect of personnel safety concerns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
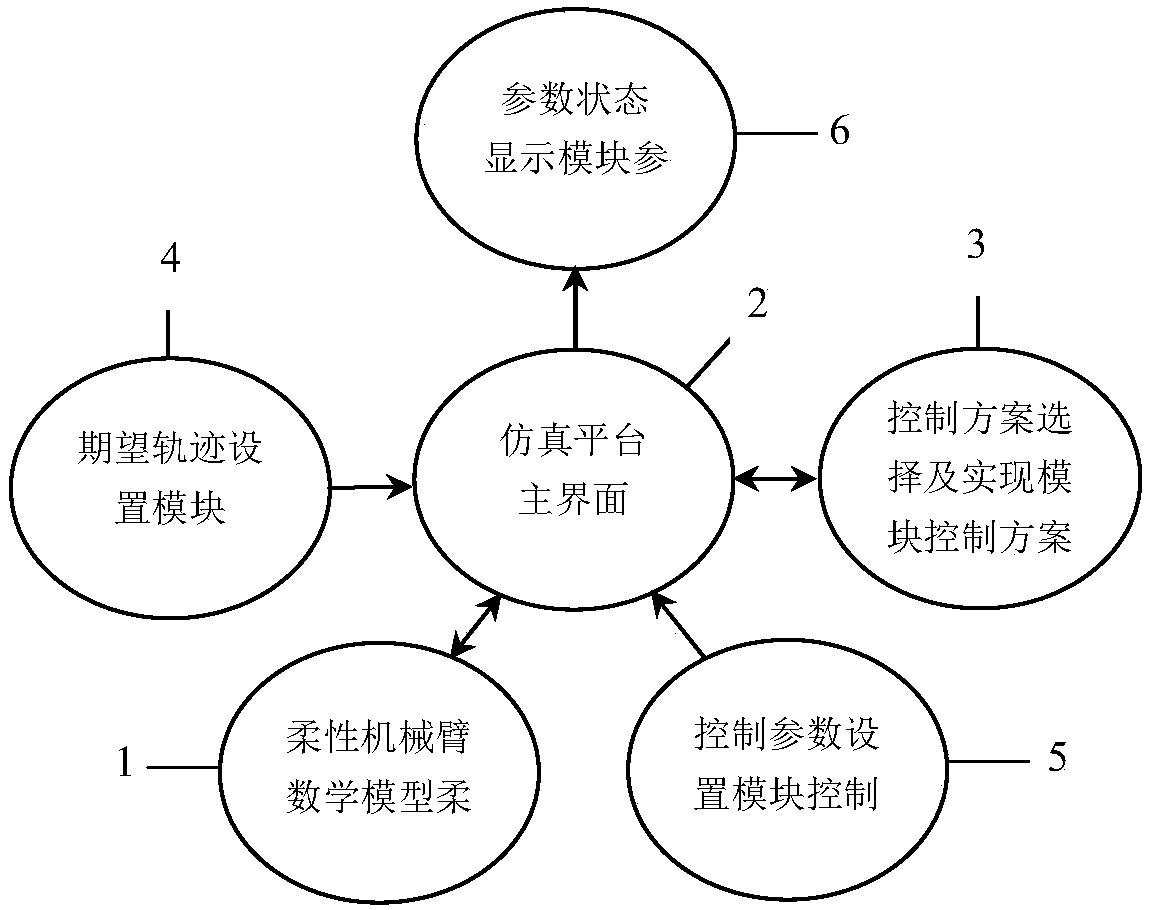
[0039] Each module embodiment of the present invention is as follows:
[0040] 1. Mathematical model of flexible manipulator 1 Working principle
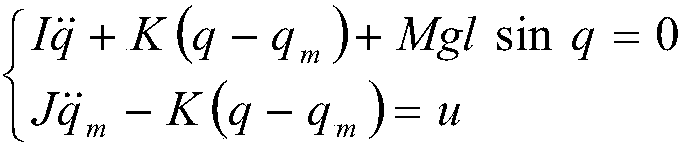
[0041] Based on the Simulink programming environment, the control system model of the flexible manipulator is established, including the system controller, controlled model and observer. Each module is responsible for data processing in each link of the control system in the form of S function. The processing functions contained in the module and the input and output of data are realized by the instructions of the corresponding M files. The mathematical model equation is as follows:
[0042]
[0043] Among them, q and q m Respectively represent the angular position of the connecting rod and the rotor; I and J represent the moment of inertia of the connecting rod and the rotor respectively;
[0044] K represents the joint stiffness coefficient; M, g, l represent the mass of the connecting rod, the acceleration of gravity and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More