

Dynamic positioning control method based on UKF and constraint model predictive control
A technology of predictive control and dynamic positioning, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of control effect, not considering state estimation, filtering, consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
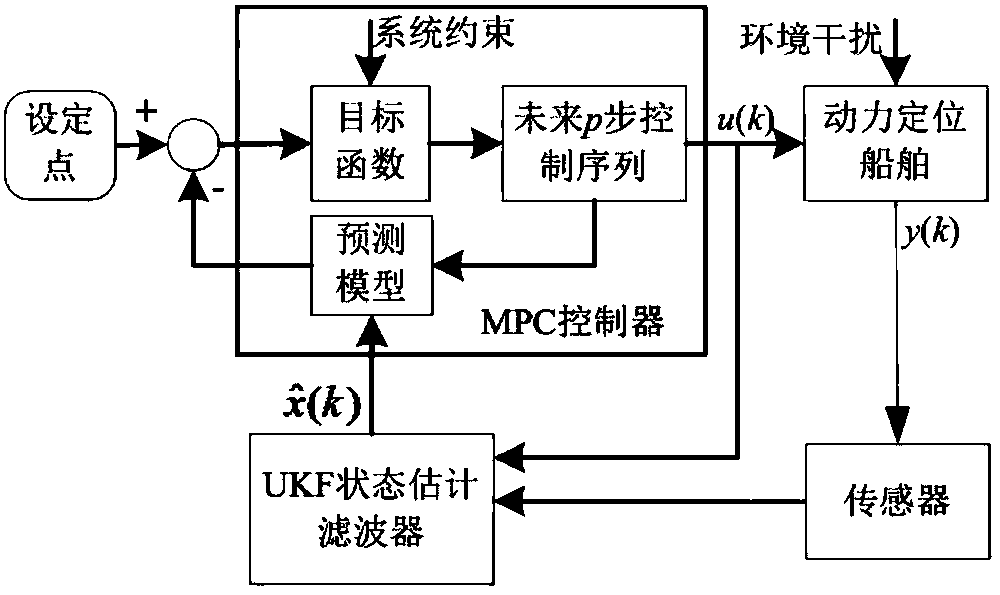
[0071] A ship dynamic positioning control method based on UKF filtering and constraint model predictive control. UKF is used to estimate the state of the dynamic positioning system and filter design to estimate the unknown state and filter out high-frequency motion components and measurement noise. Only low-frequency The motion component is used as the input of the controller to design a model predictive controller to further improve the stability and reliability of the MPC controller.
[0072] Such as figure 1 Shown, the implementation steps of the present invention are as follows:
[0073] Step 1. Obtain the actual ship position (x, y) and course information Ψ of the ship through the position reference system and the compass sensor, and send it to the UKF filter;
[0074] Step 2. The UKF state estimation filter filters out the noise signal and the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More