

Spine three-dimensional positioning method
A positioning method and positioning algorithm technology, applied in the direction of stereotaxic surgical instruments, puncture needles, trocars, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0114] Embodiment 1. Positioning method for spinal puncture based on three-dimensional space positioning algorithm
[0115] Step 1, obtain the spine front view through the X-ray photograph ( Figure 4 ) and profile ( Figure 5 ) image, set the target bit reference scale of the front bitmap and the side bitmap when taking pictures;
[0116] Step 2, import the X-ray photo image, and determine the spatial positions of the marker points C and D in the front view and the lateral view according to the given scale;
[0117] Step 3, respectively mark the origin and the coordinate system in the images of the front view and the side view, and set the scale;
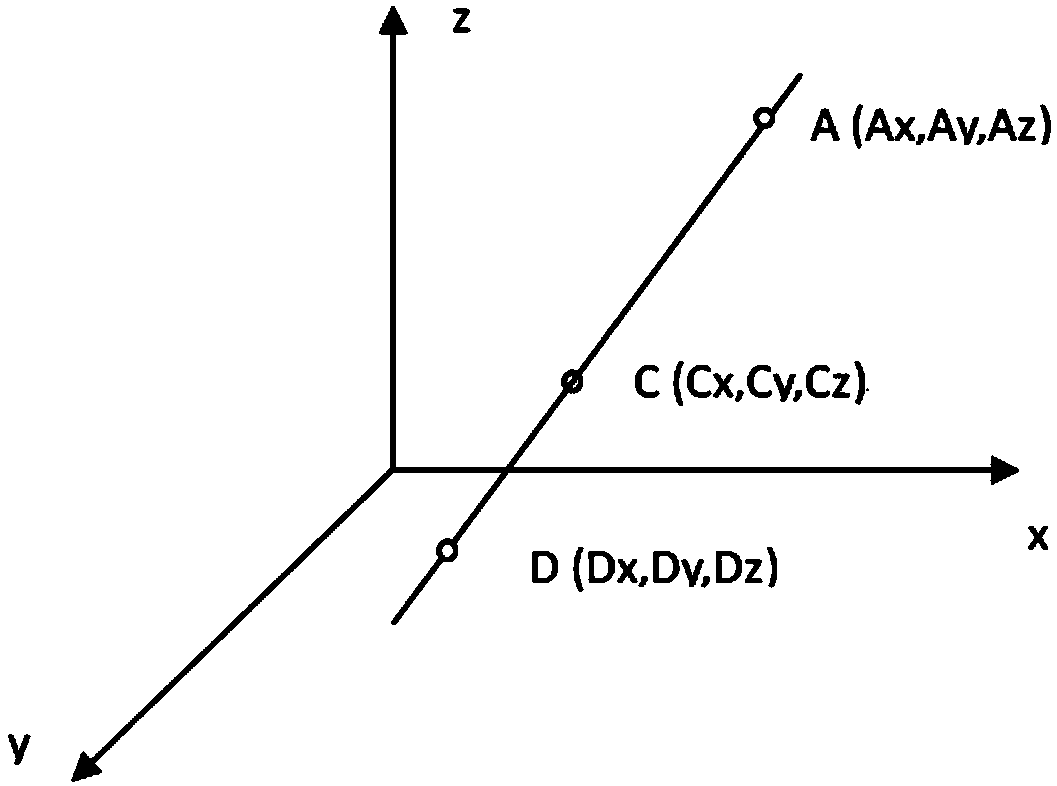
[0118] Step 4. Mark the relevant points in the image: the longitudinal coordinates of the puncture start point A, the skin entry point B and the puncture end point E, and the system calculates and generates the coordinate values of each point;
[0119] (1) Bring the known Az coordinates into the equation to get the Ax and Ay v...
Embodiment 2
[0149] Embodiment 2. Develop computing system with the method of the present invention
[0150] 1. System composition and calculation method
[0151] refer to Figure 7 As shown, the system includes the following modules: image input module (B1), used to import X-ray photos; image analysis module (B2), used to set the coordinate system of the image, set the scale of the image, and mark the relevant points on the image The data checking module (B3) is used to check the integrity of the data; the data calculation and display module (B4) is used to calculate and output the calculation results of the puncture position and angle.
[0152] The image input by the image input module is an X-ray photo, including an anteroposterior image of the spine and a lateral image of the spine; the image analysis module has an image angle calibration function.
[0153] The relevant points are the longitudinal coordinates of the puncture start point A, the skin entry point B, the puncture end poi...
Embodiment 3
[0192] Embodiment 3. method verification experiment
[0193] 1. Materials and methods
[0194] 1. Materials:
[0195] Select 4 adult spine cadavers with complete T2-S1 dorsal structure (skin and soft tissue) to verify the puncture instrument and calculation method. Each specimen can provide a total of 12 bilateral L1-S1 pedicle puncture locations, and a total of 48 punctures were performed.
[0196] Before the puncture, the specimens underwent spinal computerized tomography (CT) and X-ray examination.
[0197] 2. Method:
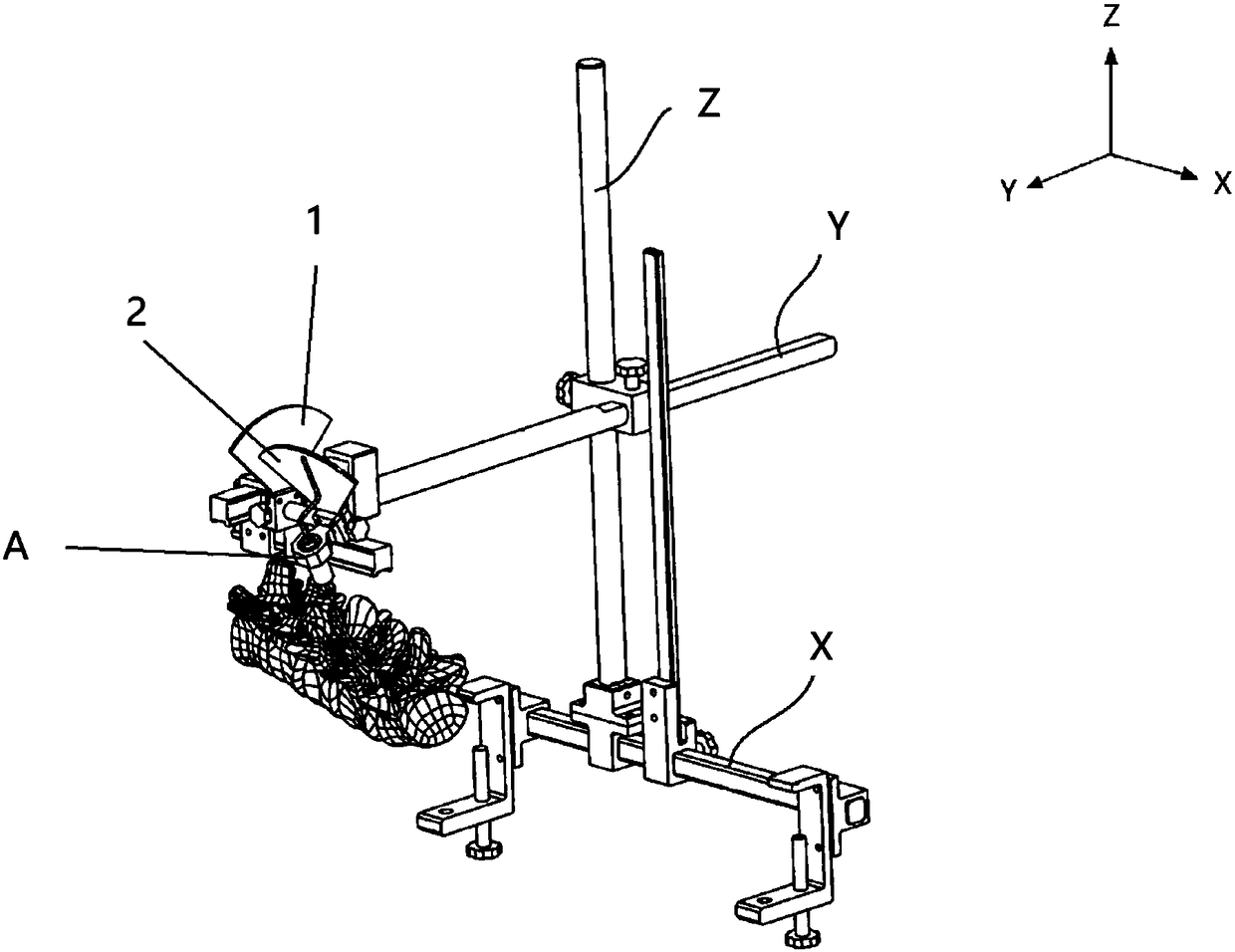
[0198] Puncture process and locator ( figure 1 and figure 2 ), calculation software (embodiment 2) method of use is the same as the preceding description. Input the revised standard coordinate values into the calculation software to obtain the coordinates of the puncture starting point and the puncture direction, adjust the parameters of the locator, and start the puncture. The puncture needle used in this experiment was a Kirschner wire. When th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More