

Mobile electronic device and method therein
A mobile electronic equipment, motion technology, applied in the direction of motor vehicles, non-electric variable control, two-dimensional position/channel control, etc. Efficiency, the effect of reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
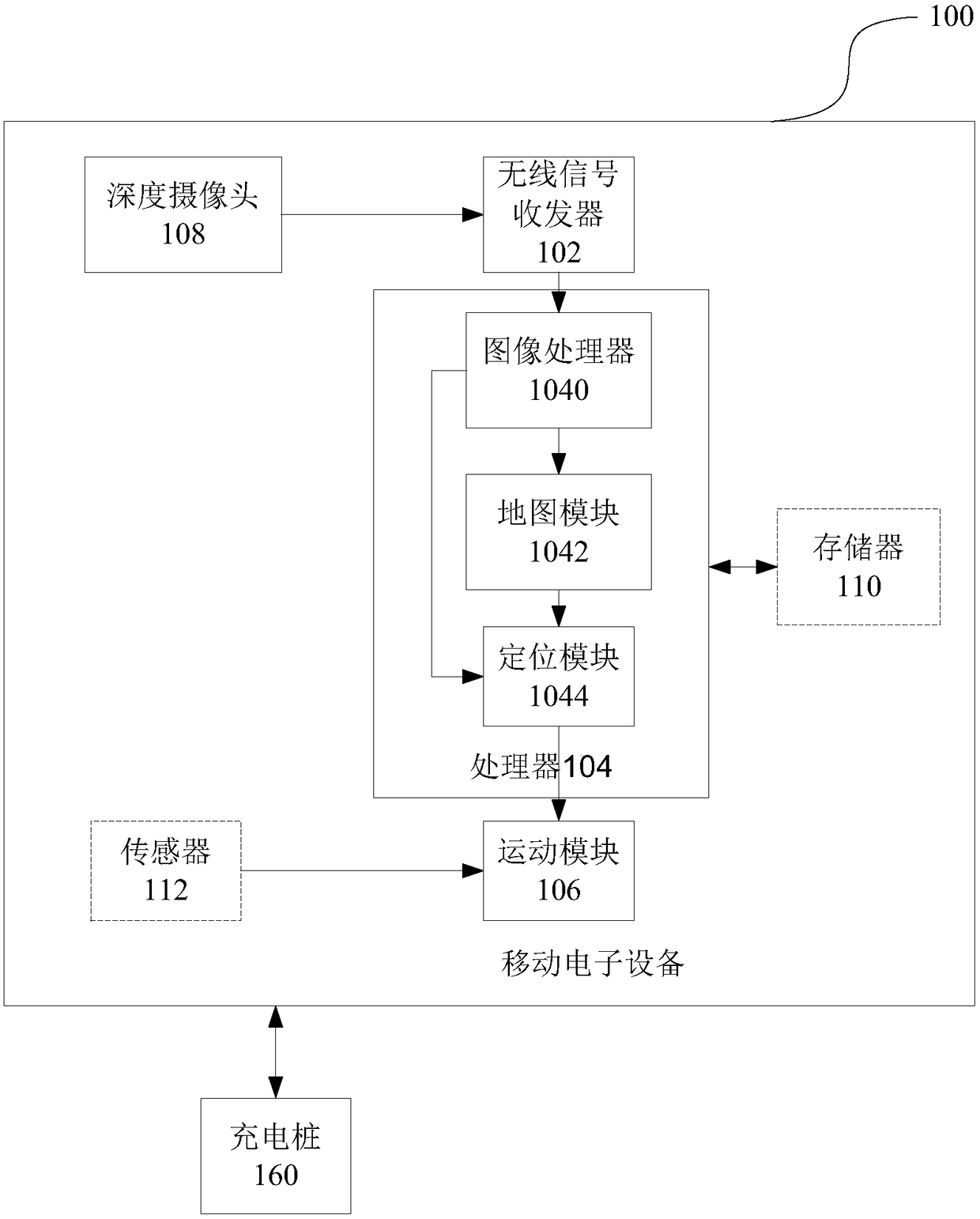
[0013] figure 1 A schematic diagram of a mobile electronic device 100 according to an embodiment of the present invention is shown.
[0014] refer to figure 1 , the mobile electronic device 100 includes but is not limited to sweeping robots, industrial automation robots, service robots, disaster relief robots, underwater robots, space robots, drones, and self-driving cars.
[0015] The signal transmission mode between the mobile electronic device 100 and the charging pile 160 includes but not limited to: Bluetooth, WIFI, ZigBee, infrared, ultrasonic, UWB, etc. In this embodiment, the signal transmission mode is WIFI as an example for description.
[0016] Optionally, the system of the embodiment also includes a second mobile electronic device, such as a mobile APP, communicating with the wireless signal transceiver 102 of the first mobile electronic device 100, and the second mobile electronic device can visually display the 3D modeling information, and user-friendly operati...
Embodiment 2
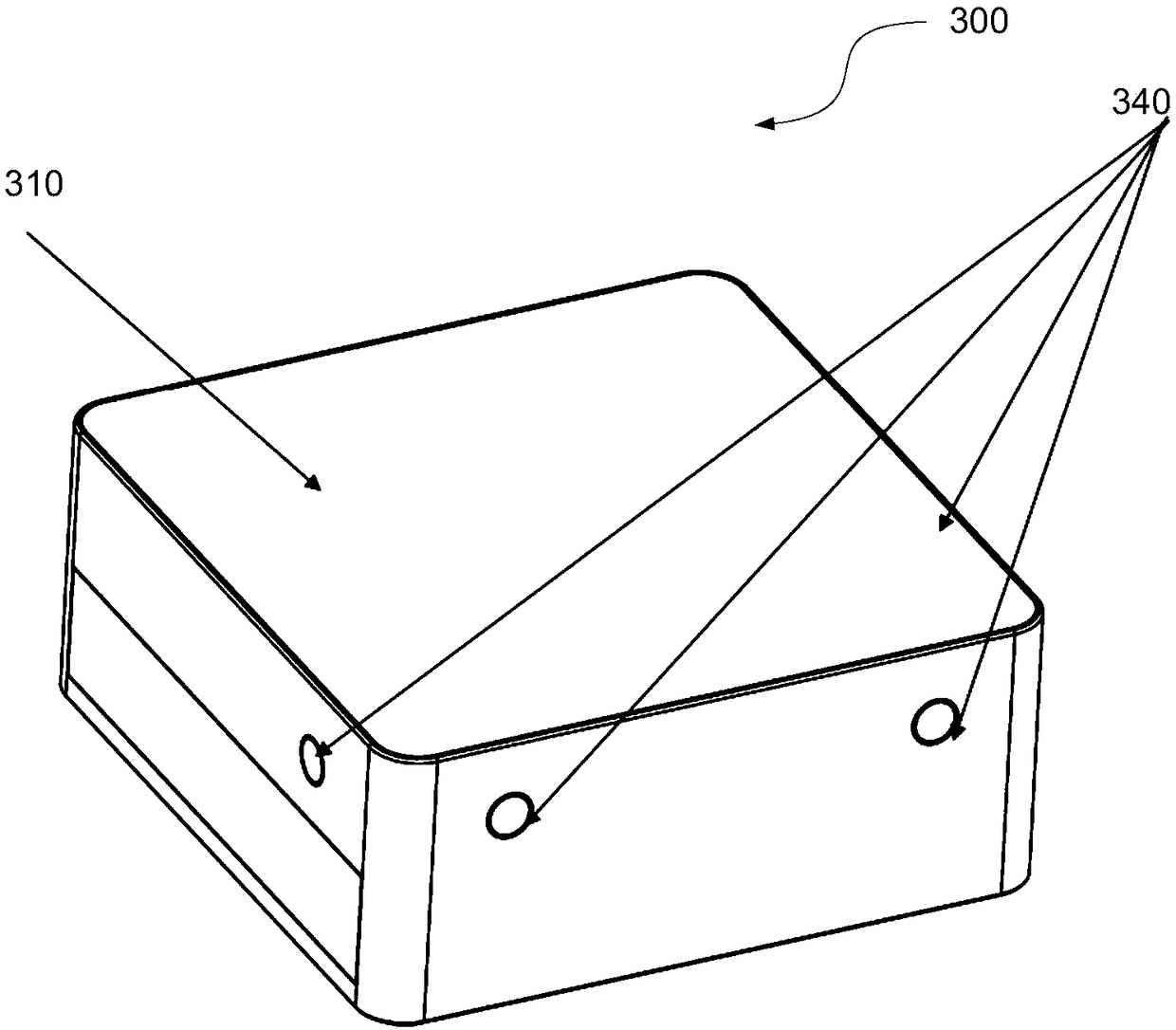
[0035] Figure 3A-3D A schematic diagram of a mobile electronic device 100 according to an embodiment of the present invention is shown. In the following, the mobile electronic device 100 is the robot 300 as an example for description.
[0036] refer to Figure 3A-3D , the robot 300 is mainly composed of five parts: a main body 310 , a wireless transceiver 320 , a microprocessor 330 , a sensor 340 , and a charging pile 350 . The user can use the wireless transceiver 320 , the microprocessor 330 and the charging pile 350 to realize the fixed-point function in a certain area, and use the sensor 340 to assist the main body 310 to complete the designated function operation.
[0037] refer to Figure 3A and Figure 3B The main body 310 is the carrier of the microprocessor 330 and the sensor 340, and the microprocessor 330 can assist the control unit of the main body 310 to perform functions such as movement.
[0038] refer to Figure 3C and Figure 3D , the wireless transcei...
Embodiment 3
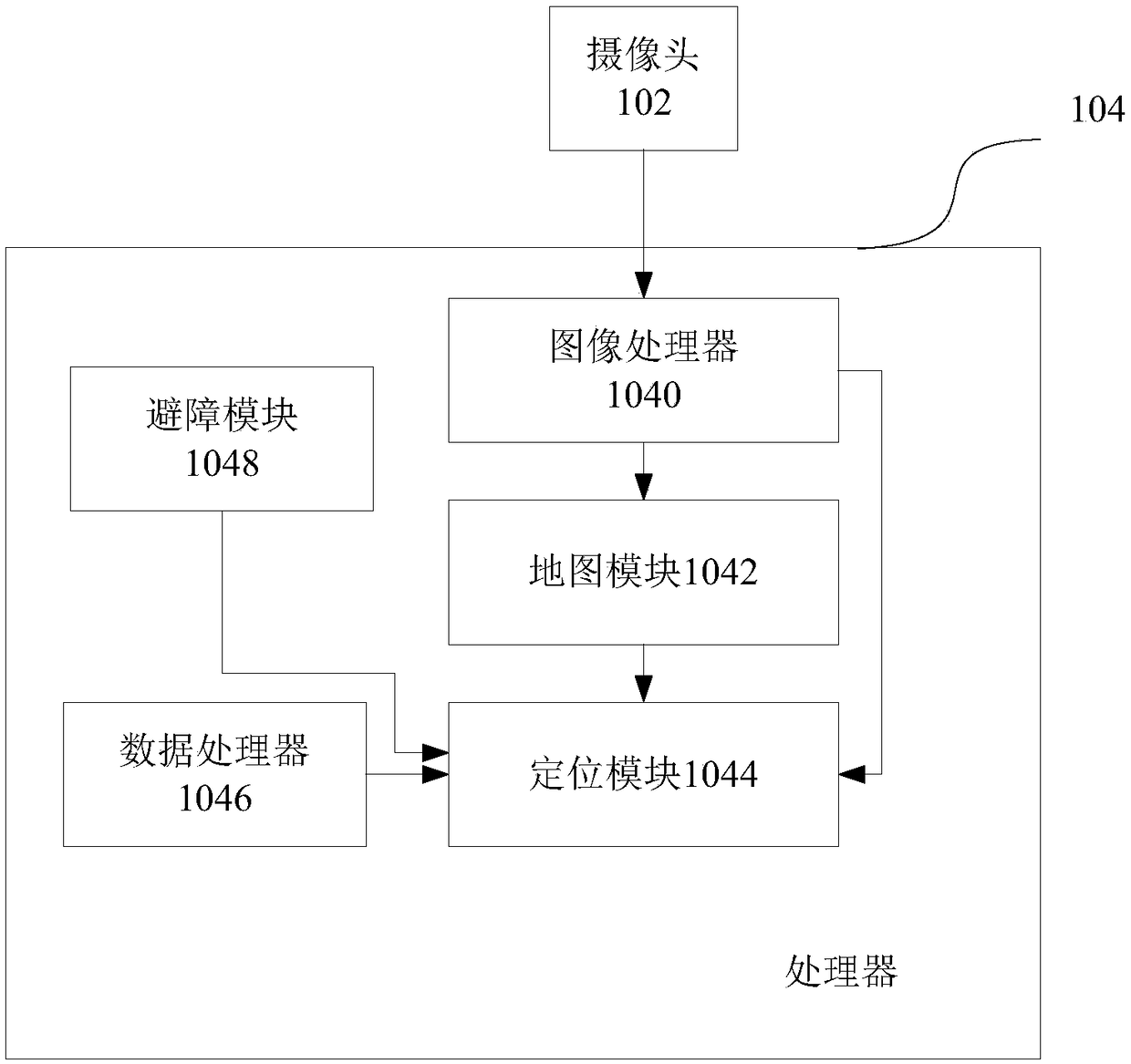
[0043] Figure 4 A method 400 in a mobile electronic device is shown, the mobile electronic device 100 includes at least one depth camera 108, a wireless signal transceiver 102, an image processor 1040, a map module 1042, a positioning module 1044 and a motion module 106, wherein the method 400 includes: in block 410, through the wireless signal transceiver 102 communicably connected to the at least one depth camera 108, acquire the plane graphic information collected by the at least one depth camera 108 and the distance information of the objects in the graphic, and The three-dimensional information including planar graphics information and distance information is sent to the image processor 1040; in block 420, the received multiple three-dimensional information is processed through the image processor 1040 communicably connected to the wireless signal transceiver 102; In 430, through the map module 1042 communicably connected to the image processor 1040, according to the plu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More