

Caster mixed type hydraulic mechanical leg and control method
A technology of hydraulic machinery and control methods, which is applied in the direction of casters, wheels, fluid pressure actuation devices, etc., can solve the problems of difficulty in robot stable braking control, inability to realize automatic braking, and poor stability of braking conditions, so as to avoid Manual braking method, low processing cost and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Further illustrate concrete structure and embodiment of the present invention below in conjunction with accompanying drawing:
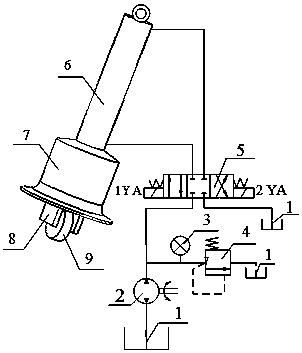
[0022] combine Figures 1 to 6 , the structural composition of the present invention includes: fuel tank (1), pump (2), pressure gauge (3), overflow valve (4), electromagnetic reversing valve (5), hydraulic cylinder (6), standing feet (7) , roller (8), roller shaft (9), roller support width (10); the path of the oil supply tank (1) is connected to the port of the electromagnetic reversing valve (5), and the port of the electromagnetic reversing valve (5) Connect with the two-way oil port of the hydraulic cylinder (6).
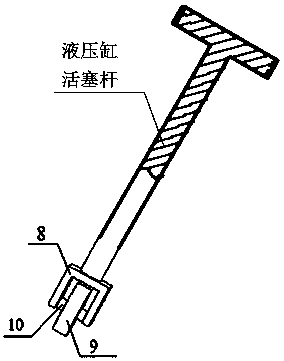
[0023] The assembly process of the caster hybrid hydraulic mechanical leg of the present invention is as follows: first pass the piston rod of the hydraulic cylinder (6) through the through hole of the standing foot (7) structure, and then connect the external thread of the standing foot (7) structure with the hydraulic cylinde...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More