

Robot optimal energy efficiency path planning method based on improved A algorithm
An optimal path planning and optimal path technology, applied in the direction of instruments, two-dimensional position/course control, vehicle position/route/height control, etc., can solve the problem that the final path is not optimal, robot consumption, algorithm direction restrictions, etc. problem, to achieve the effect of reducing energy consumption, reducing the number of turning times, and reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0042] The present invention abandons the previous optimal distance path, and instead replaces the optimal path with energy efficiency; the single-neighborhood expansion of the traditional A* algorithm affects the result of the optimal path, and the improved multi-neighborhood search A* algorithm makes the path result more optimal.
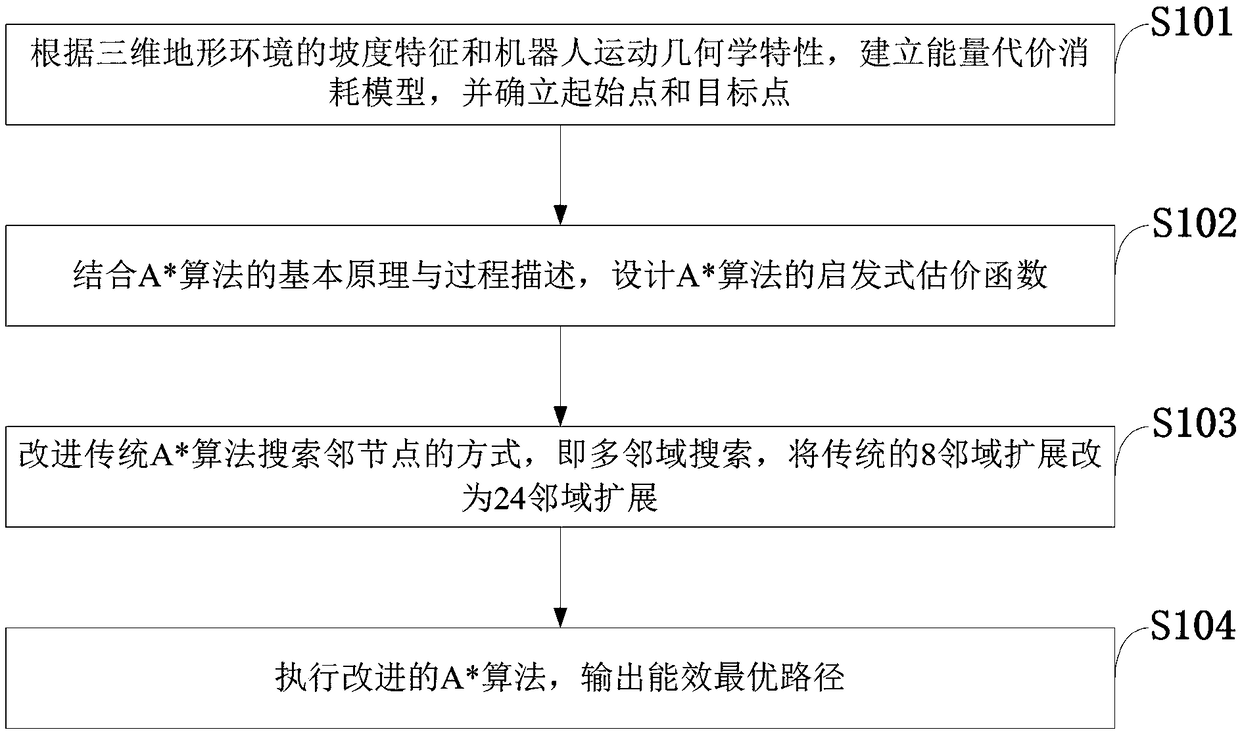
[0043] Such as figure 1 As shown, the robot energy efficiency optimal path planning method based on the improved A algorithm provided by the embodiment of the present invention includes the following steps:
[0044] S101: According to the slope characteristics of the three-dimensional terrain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More