

Robot service autonomous cognition method and robot based on emotion-spatial-temporal information
A robot and emotion technology, applied in the field of service robots, can solve the problems that restrict the development of service robots like humanization and intelligence, and insufficient consideration of user emotional factors, so as to improve the degree of intelligence and personification, and enhance the effect of service experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
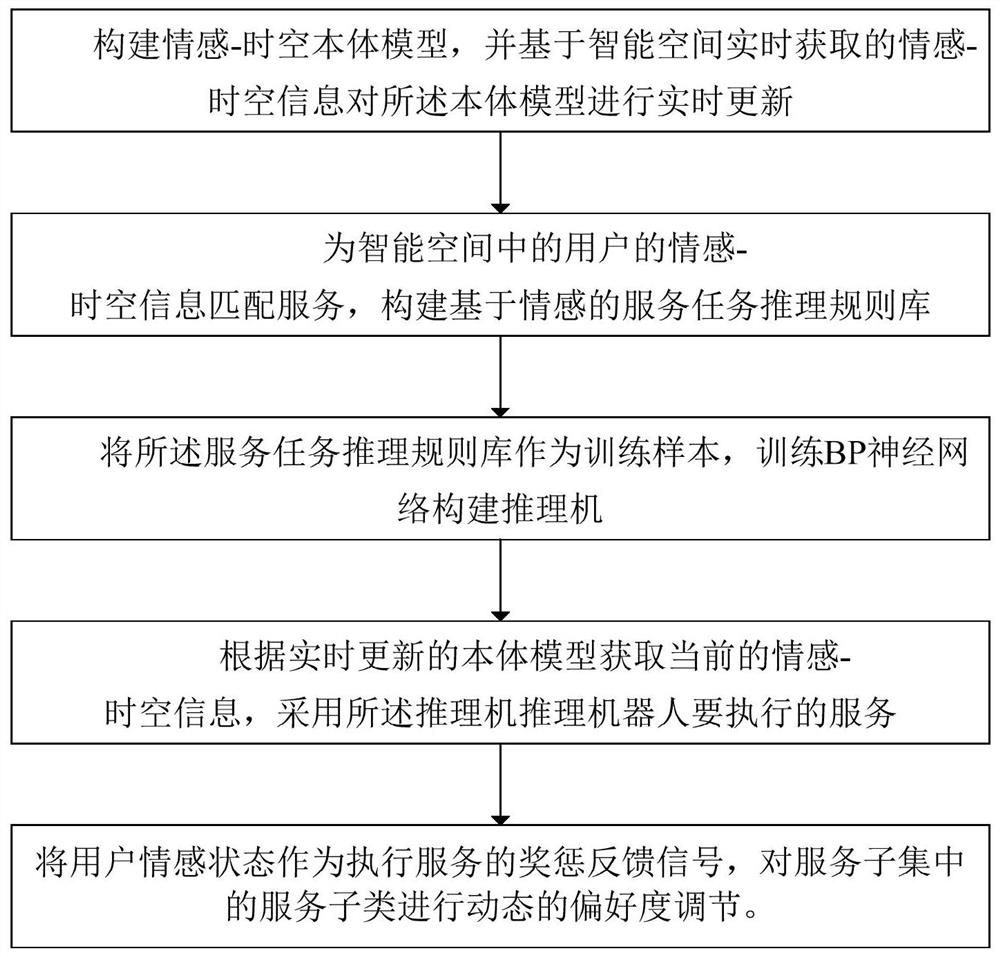
[0053] This embodiment discloses a robot service autonomous cognition method based on emotion-spatial-temporal information, such as figure 1 shown, including the following steps:
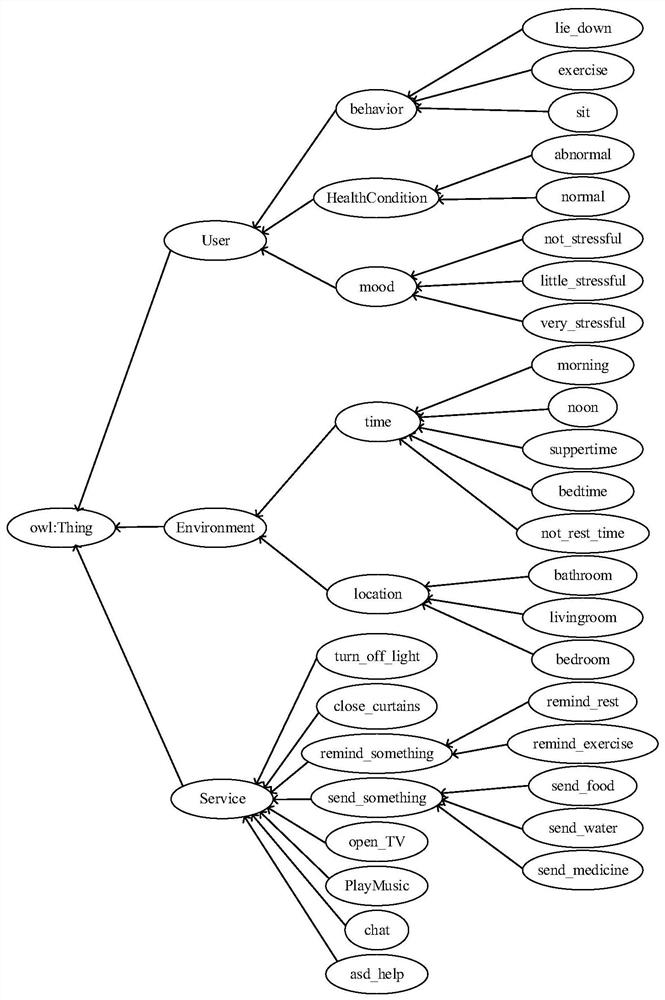
[0054] Step 1: Construct an emotion-spatio-temporal ontology model, and update the ontology model in real time based on the emotion-spatio-temporal information acquired in real time by the smart space;
[0055] Step 2: For the user's emotion-spatial-temporal information matching service in the smart space, construct an emotion-based service task reasoning rule base;
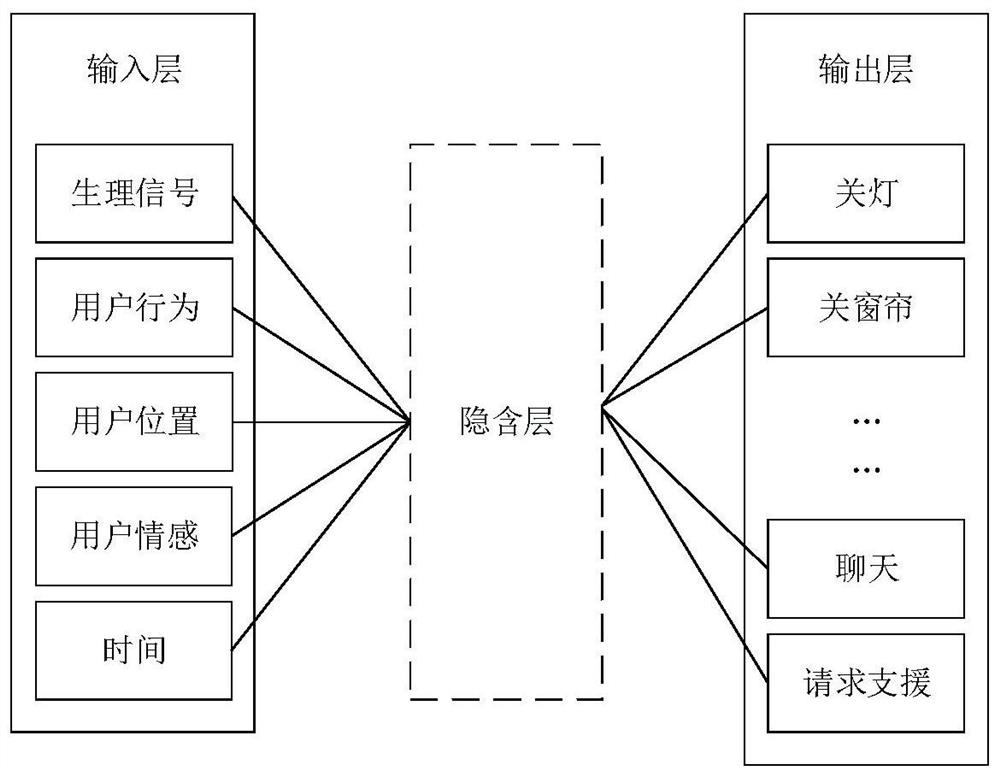
[0056] Step 3: using the service task inference rule base as a training sample, training a BP neural network to build an inference engine;
[0057] Step 4: Obtain the current emotion-spatial-temporal information according to the ontology model updated in real time, and use the inference engine to infer the service to be performed by the robot;
[0058] Step 5: Use the user's emotional state as the reward and punishment feedback signa...
Embodiment 2
[0097] The purpose of this embodiment is to provide a computer-readable storage medium for a service robot or a server device in an intelligent space.
[0098] A computer-readable storage medium, which stores a pre-established service task inference rule base and a computer program that can run on a processor. When the processor executes the program, the following steps are implemented:
[0099] Receive real-time emotional-spatial-temporal information acquired by the smart space to update the constructed emotional-spatial-temporal ontology model in real time;
[0100] Using the service task inference rule base as a training sample, train a BP neural network to build an inference engine;
[0101] The current emotion-spatial-temporal information is obtained according to the ontology model updated in real time, and the reasoning machine is used to infer the service to be performed by the robot.
[0102] Further, the following steps are also implemented:
[0103] The user's emot...
Embodiment 3
[0105] The purpose of this embodiment is to provide a service robot.
[0106] A service robot includes a processor and the computer-readable storage medium described in Embodiment 2. When the processor executes, it performs autonomous cognition of services, and controls the robot to perform corresponding services according to the cognition results.
[0107] The steps involved in the devices of the above embodiments 2 and 3 correspond to those of the method embodiment 1, and for specific implementation methods, please refer to the relevant description of the embodiment 1. The term "computer-readable storage medium" shall be construed to include a single medium or multiple media including one or more sets of instructions; and shall also be construed to include any medium capable of storing, encoding, or carrying A set of instructions to execute and cause the processor to execute any method in the present invention.
[0108] Simulation experiment and result analysis
[0109] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More