

An underwater networking method for underwater robots
A technology for underwater robots and robots, applied in network topology, wireless communication, transmission systems, etc., can solve problems such as the application of small underwater robots, communication distances that are difficult to exceed 1 meter, multipath and Doppler effects, etc. Achieve fast data transmission rate, improve reliability and stability, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Embodiments of the present invention are described in detail below, and examples of the embodiments are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
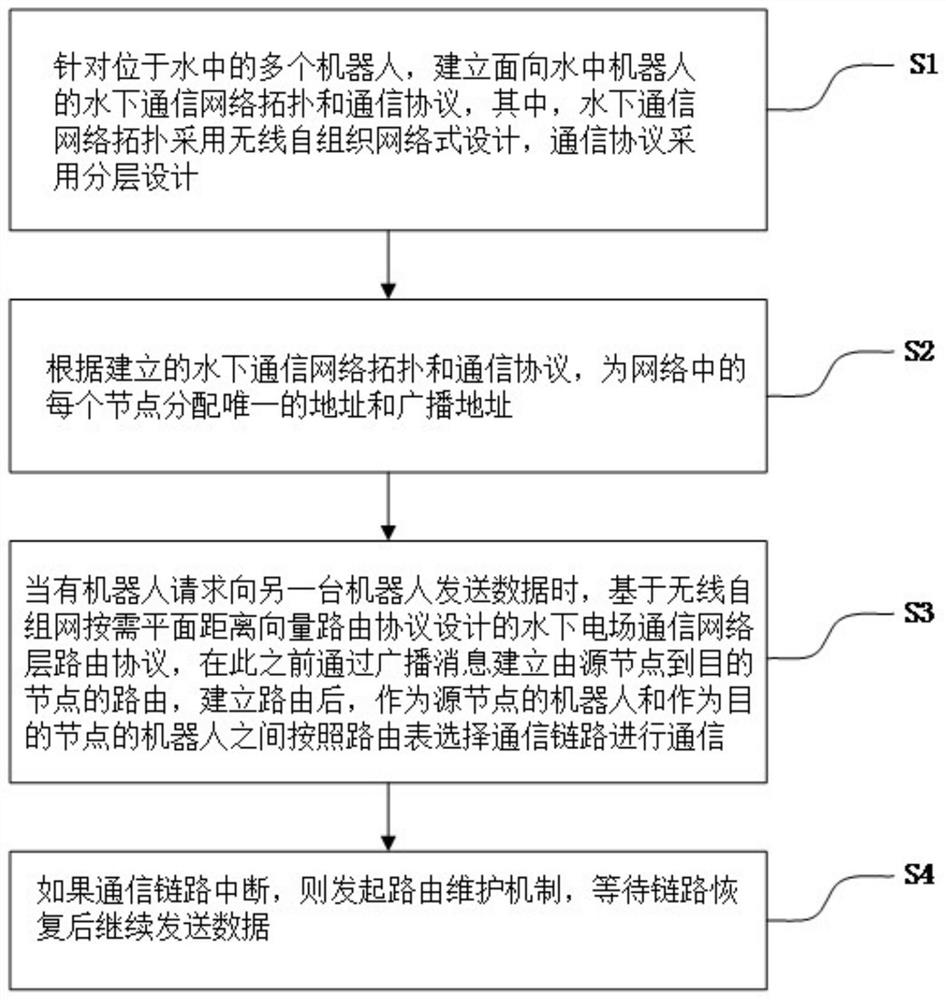
[0041] The present invention proposes an underwater networking method for underwater robots, which is suitable for networking and formation of small underwater robots based on underwater electric field communication, which is beneficial for multiple underwater robots to complete tasks cooperatively, and can solve the problem of multiple robots The problem of networking in water can be applied in complex water environments to ensure the stability of the water network and the real-time communication, and the energy consum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More