

Spatial non-cooperative target autonomous relative navigation in-orbit validation system based on image information
A non-cooperative target and relative navigation technology, which is applied in the field of autonomous relative navigation on-orbit verification systems for space non-cooperative targets based on image information, and can solve problems such as inability to perform action coordination, no specific identification, and invalid rolling state.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be described in detail below in conjunction with the accompanying drawings and examples.
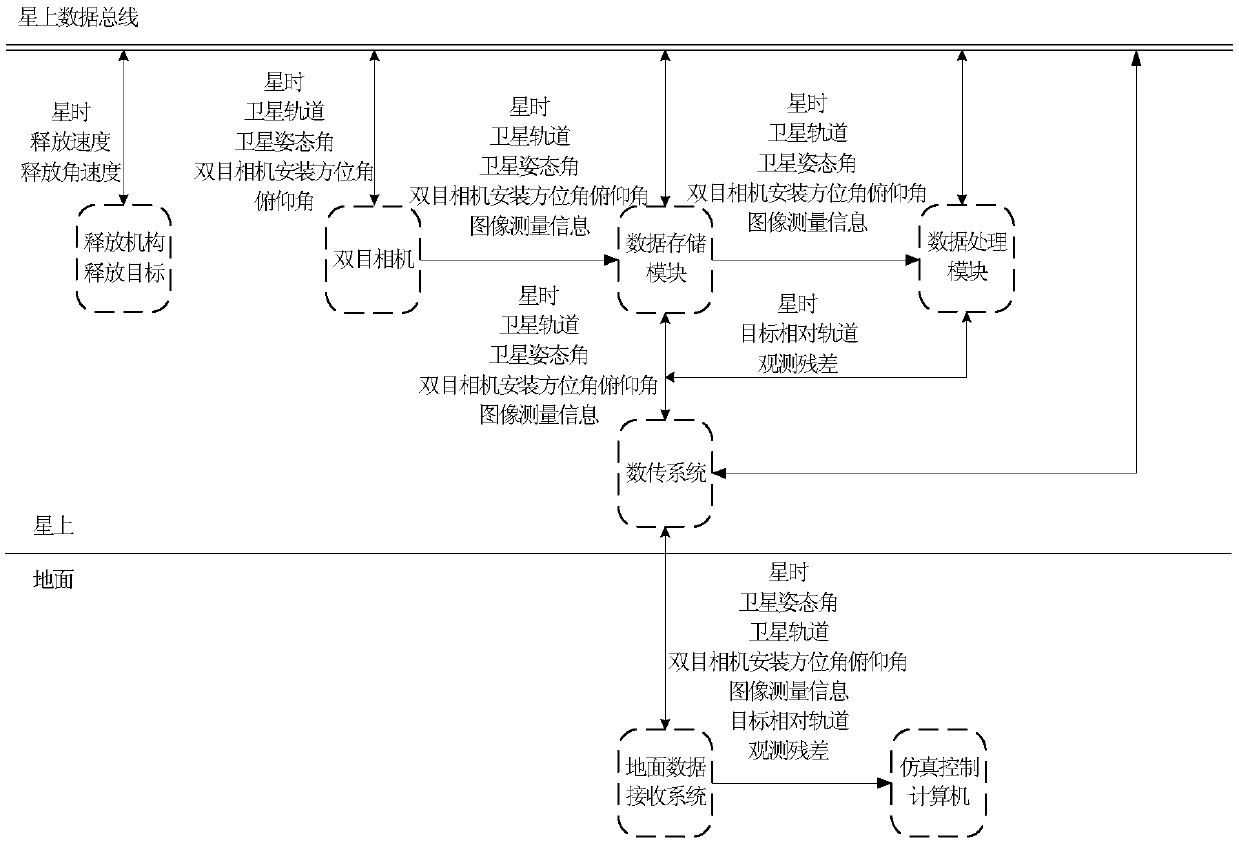
[0083] Such as figure 1 As shown, the on-orbit verification system for autonomous relative navigation of space non-cooperative targets based on image information includes a binocular camera communicating with the on-board data bus, a target release mechanism, a data storage module, and a data processing module; The receiving system communicates through the data transmission system;
[0084] The target release mechanism receives instructions from the on-board data bus to release the space-borne target at a speed that meets the on-orbit verification, so that the released space-borne target has the characteristics of a space non-cooperative target and enters the measurement range of the binocular camera;
[0085] The binocular camera receives power-on instructions from the on-board data bus, as well as satellite time, satellite orbit, satellite attitude an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More