

Four-rotor aircraft attitude control method based on factor self-adaptive fuzzy PID
A four-rotor aircraft, adaptive fuzzy technology, applied to controllers with specific characteristics, electric controllers, etc., can solve the problem that quantization factors and scaling factors cannot be optimized in real time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing.
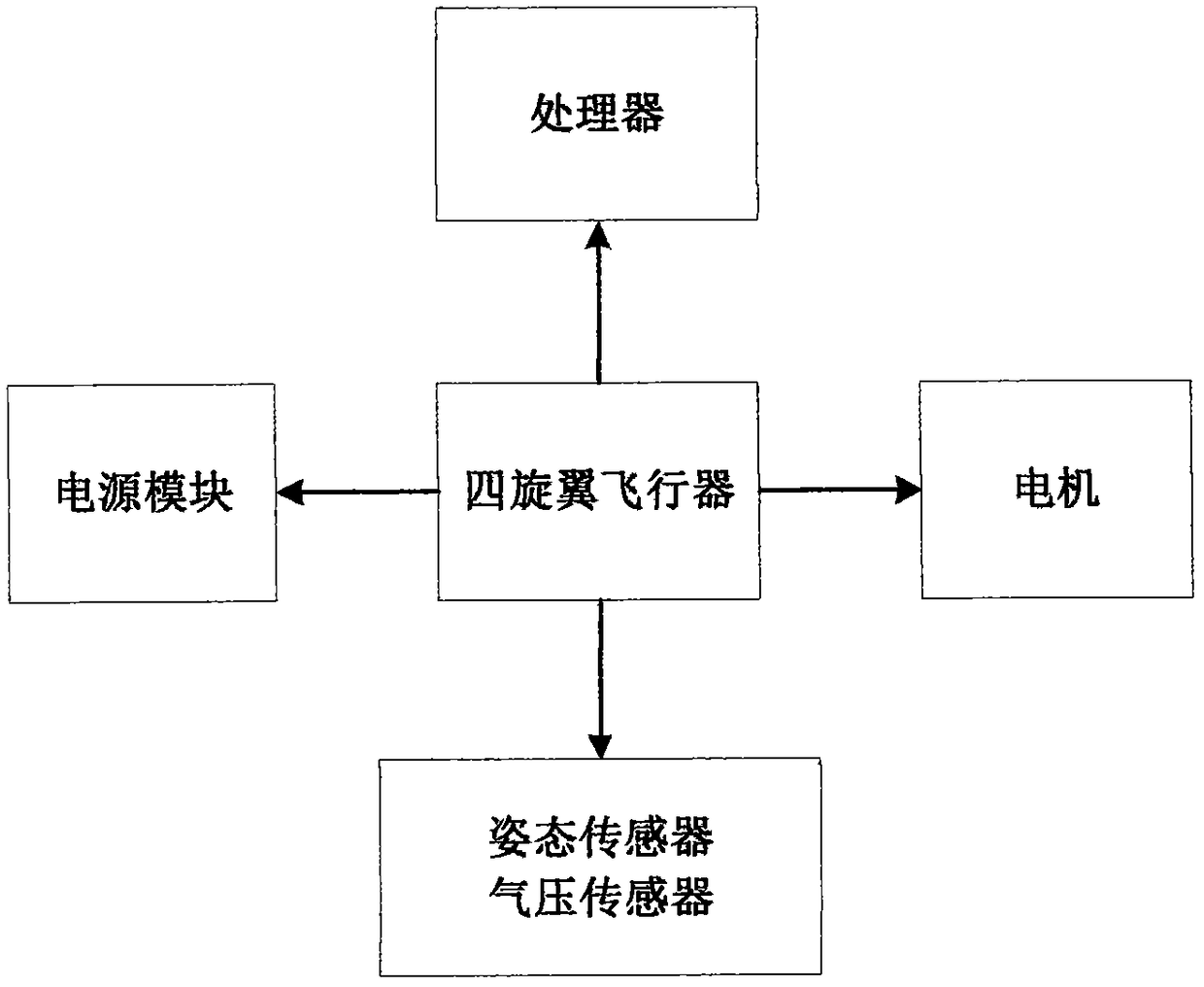
[0029] 1. The quadrotor aircraft includes a power supply module, a processor module, a sensor module including an attitude sensor module and an air pressure sensor module, and an actuator motor. The overall block diagram of the system is as follows: figure 1 The attitude sensor is used to collect the acceleration and angular velocity information of the quadrotor aircraft in real time, and the current attitude angle information of the quadrotor aircraft is obtained through attitude calculation.
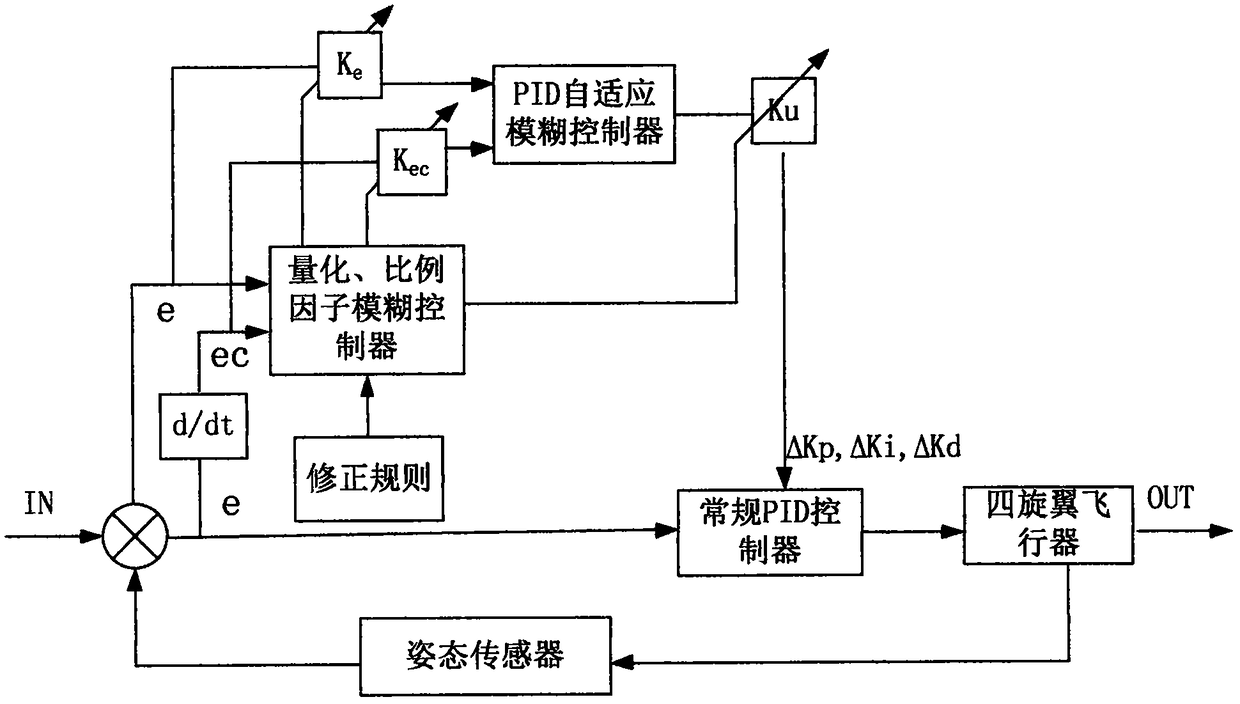
[0030] 2. figure 2 It is a control schematic diagram of a factor adaptive fuzzy PID control method proposed by the present invention, which includes input signal IN, quantization factor scaling factor fuzzy controller module, PID adaptive fuzzy controller module, and conventional PID controller module , the controlled object quadrotor aircraft, the attitude sensor module, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More