Navigation data filtering method, device, computer equipment and storage medium
A technology of navigation data and parameters, applied in the field of vehicle integrated navigation system, which can solve the problems of inability to capture non-Gaussian noise, large amount of calculation, inapplicability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
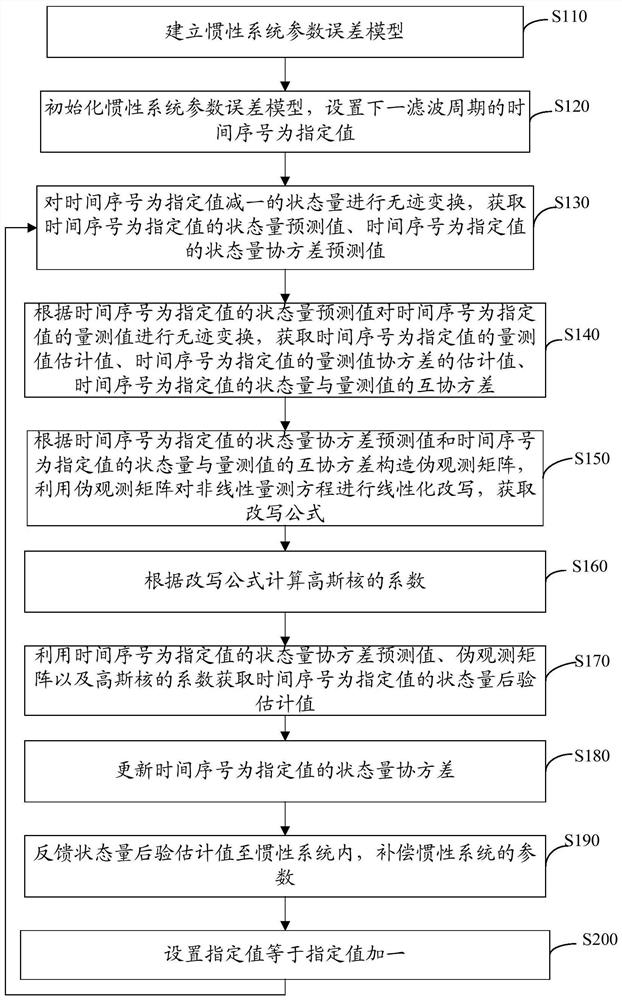
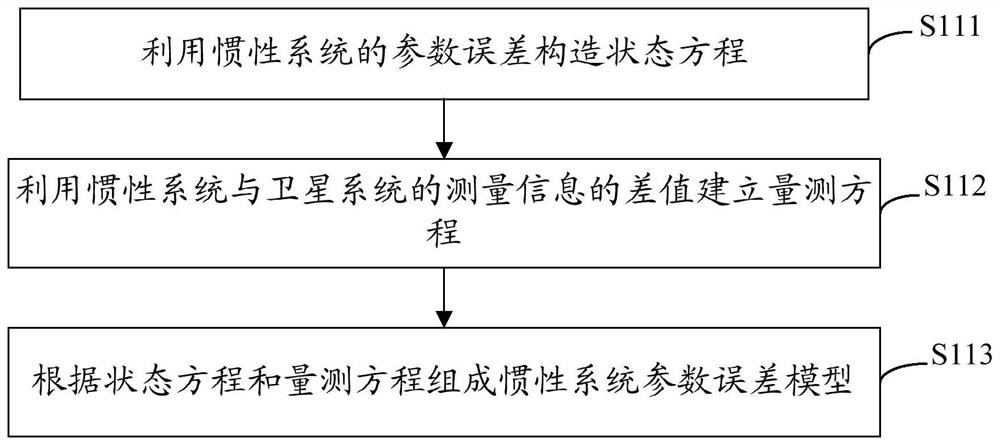
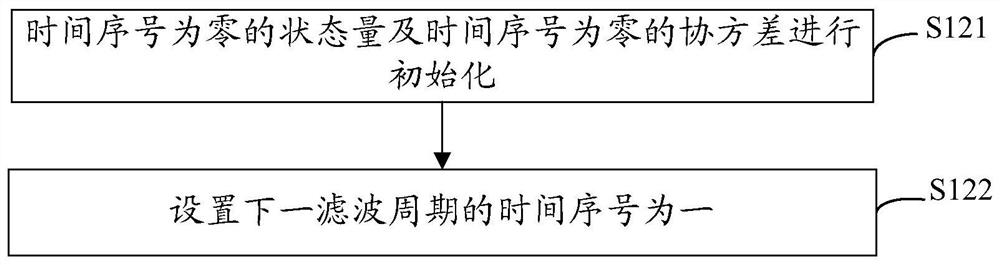
[0042] In order to fully understand the technical content of the present invention, the technical solutions of the present invention will be further introduced and illustrated below in conjunction with specific examples, but not limited thereto.
[0043] It should be understood that when used in this specification and the appended claims, the terms "comprising" and "comprises" indicate the presence of described features, integers, steps, operations, elements and / or components, but do not exclude one or Presence or addition of multiple other features, integers, steps, operations, elements, components and / or collections thereof.
[0044] It should also be understood that the terminology used in the specification of this application is for the purpose of describing particular embodiments only and is not intended to limit the application. As used in this specification and the appended claims, the singular forms "a", "an" and "the" are intended to include plural referents unless th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



