Installing conveniently type multi-joint bionic mechanical leg with self-distributed power
A bionic mechanical leg and multi-joint technology, applied in the field of intelligent bionic robots, can solve the problems of inconvenient disassembly and maintenance, complete machine paralysis, inconvenient installation and maintenance, etc., so as to reduce external energy demand, improve the reliability of the whole machine, and facilitate The effect of debugging and running
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
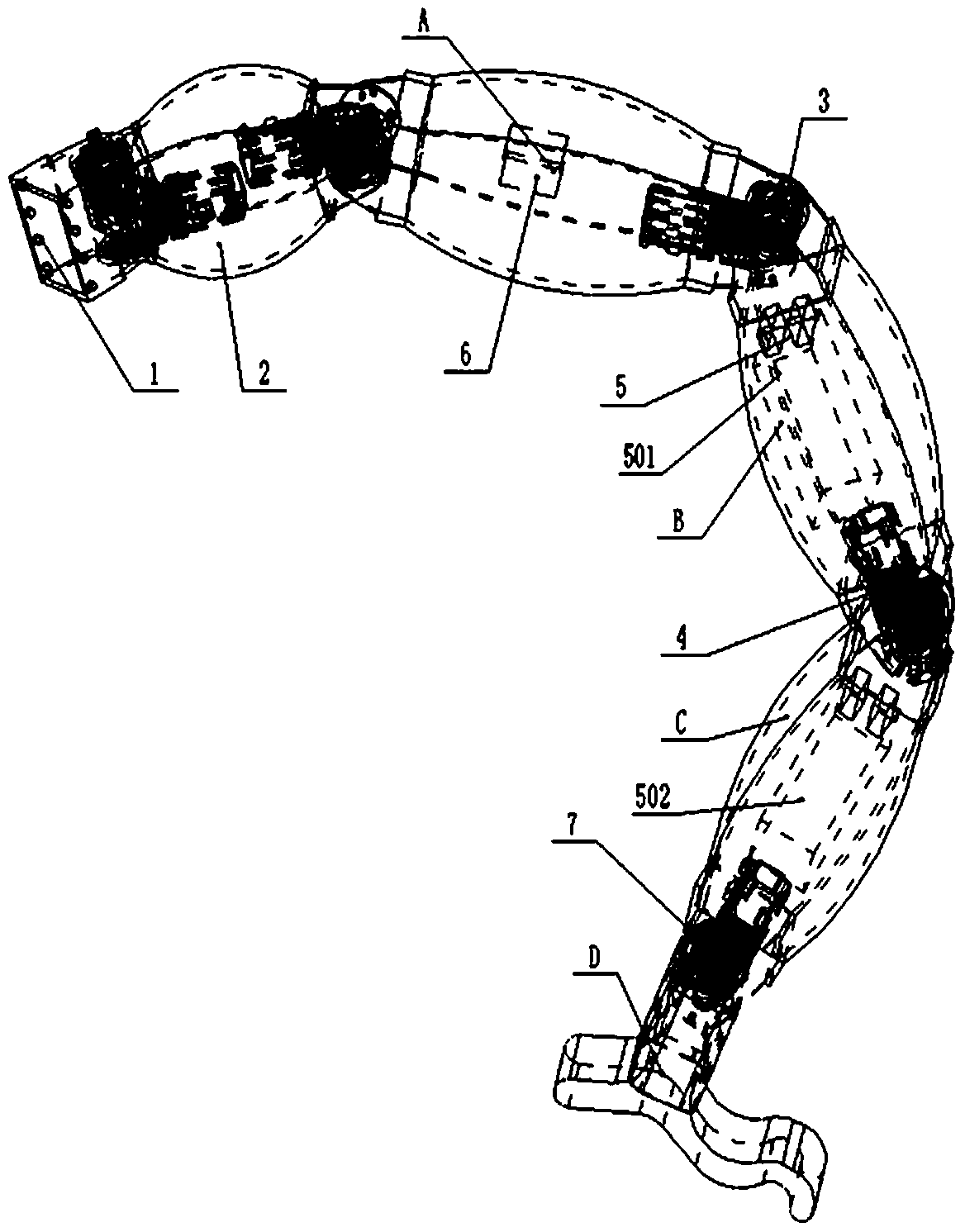
[0028] refer to figure 1 , figure 2In this embodiment, the portable multi-joint bionic mechanical leg with autonomous distributed power has 5 degrees of freedom, including connecting frame 1, three-dimensional joint I2, thigh A, two-dimensional joint III3, lower leg B, two-dimensional joint IV4, lower leg C, Two-dimensional joint V7, foot D, power device 5, and control device 6; three-dimensional joint I2 is fixed on the connecting frame 1 and connected to thigh A, thigh A is connected to calf B through two-dimensional joint III3, and calf B is connected to two-dimensional joint IV4 It is connected with the calf C; the calf C is connected with the foot D through the two-dimensional joint V7; the power device 5 is fixed in the calf B and the calf C; the control device 6 is fixed in the thigh A, and is connected with the three-dimensional joint I2, the two-dimensional joint III3, The two-dimensional joint IV4 and the two-dimensional joint V7 are electrically connected. Three-...
Embodiment 2
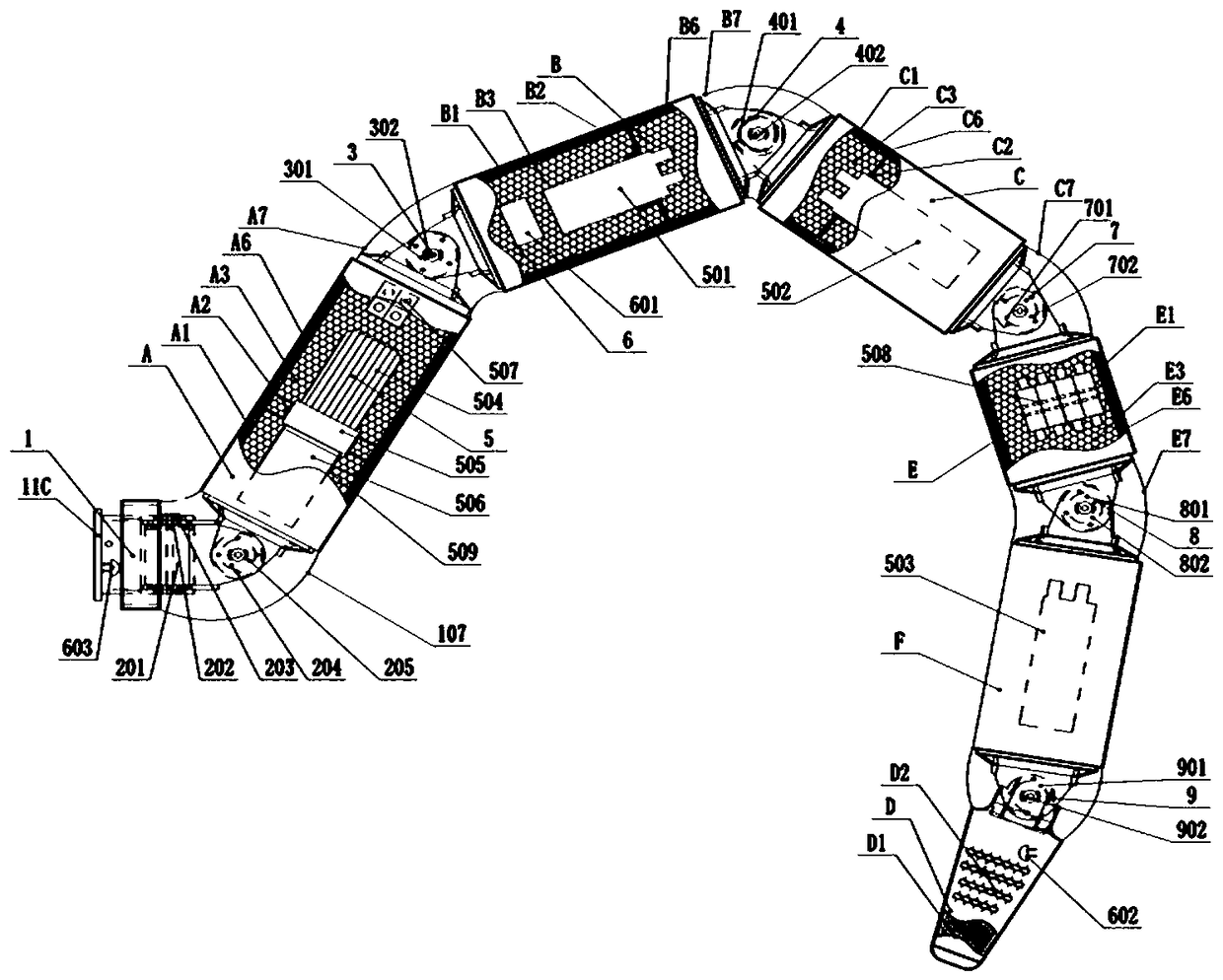
[0035] refer to image 3 , Figure 4 In this embodiment, the portable multi-joint bionic mechanical leg with autonomously distributed power has 7 degrees of freedom. The main difference from Embodiment 1 is that the calf E, calf F, two-dimensional joint VI8, and two-dimensional joint VII9 are added to achieve more Multiple degrees of freedom; the power unit 5 is set in the thigh and calf, adopting the form of a hydraulic power unit, including three sets of battery pack I501, battery pack II502, battery pack III503, drive motor 504, hydraulic pump 505, miniature oil tank 506, and solenoid valve Group 507 and electromagnetic valve group 508 provide hydraulic power for the joint movement through the hydraulic power device; the connecting frame 1 is provided with a card slot and a fixing hole 11C to connect with the main body of the bionic robot; the three-dimensional joint I2, two-dimensional joint III3, two Weiguan IV4, two-dimensional joint V7, two-dimensional joint VI8, adopt...
Embodiment 3
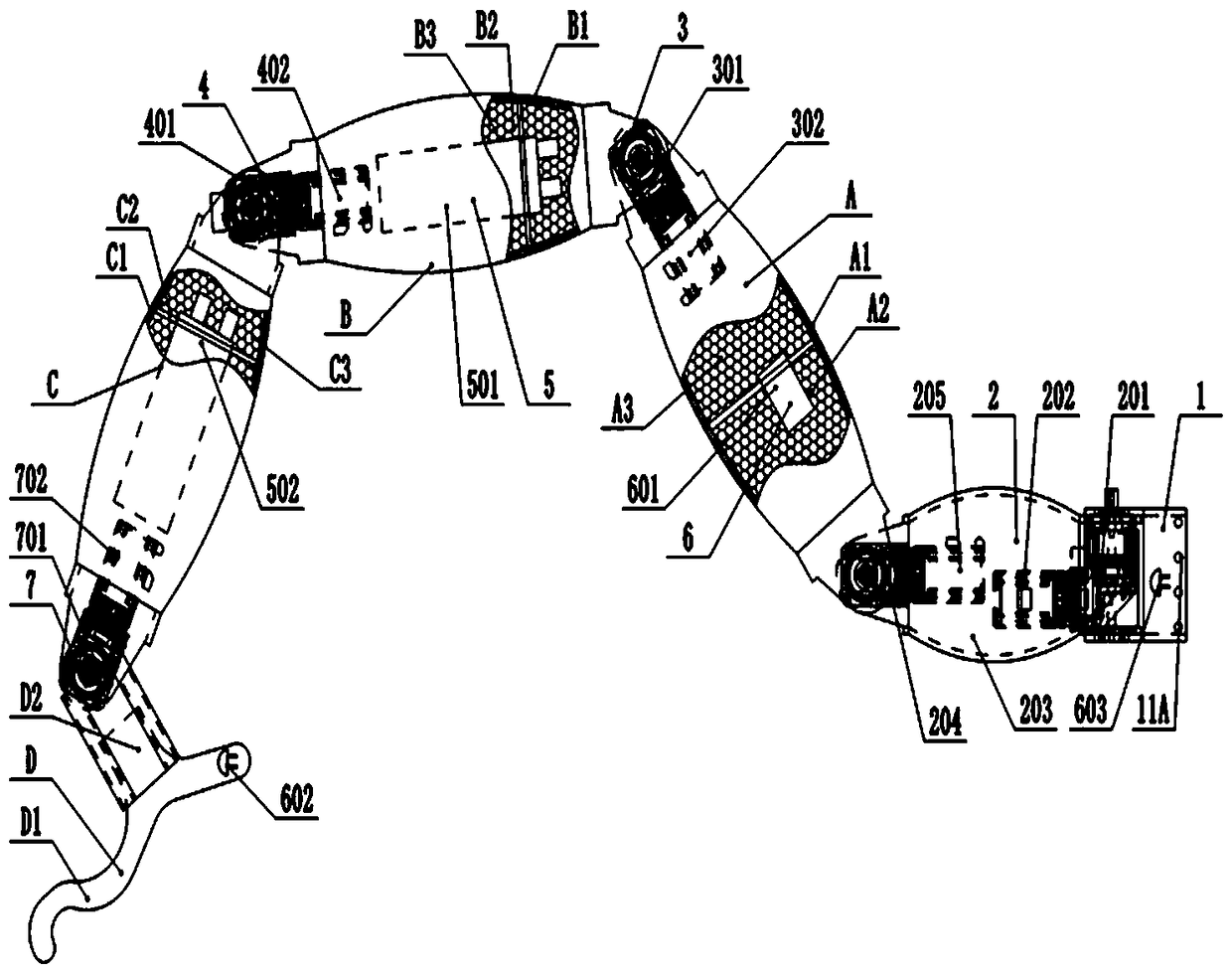
[0039] refer to Figure 5 , Image 6 In this embodiment, the portable multi-joint bionic mechanical leg with autonomously distributed power has 5 degrees of freedom. The main difference from Embodiment 1 is that the power device 5 is arranged in the thigh and the calf, and adopts the form of a hydraulic power device, mainly including Two sets of battery pack I 501, battery pack II 502, driving motor 504, hydraulic pump 505, miniature oil tank 506, and solenoid valve group 507 provide hydraulic power for the joint movement through the hydraulic power device; the connecting frame 1 is provided with bolt mounting holes 11D and The main body of the bionic robot is connected; the three-dimensional joint 2 uses a linear oil cylinder 201, a linear oil cylinder 206, a multi-link 202, and a multi-link 203 to drive the joint to rotate around the hinge pin 204 and the hinge pin 207 to realize three-dimensional space rotation; The angle sensor 205 and the sensor 208 return the real-time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More