

Multi-voyage map positioning and navigating method for suspended underwater autonomous vehicle
An autonomous vehicle and navigation method technology, applied in the field of multi-voyage map positioning and navigation, can solve the problems of limited effective distance of acoustic positioning, high cost of use, accumulation of dead reckoning errors, etc., to improve map accuracy, ensure positioning and navigation Accuracy, the effect of eliminating accumulated errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0041] The invention discloses a multi-voyage map positioning and navigation method for a suspended underwater autonomous vehicle, and its specific embodiments are as follows.
[0042] (1) Establish a single-voyage image sequence database
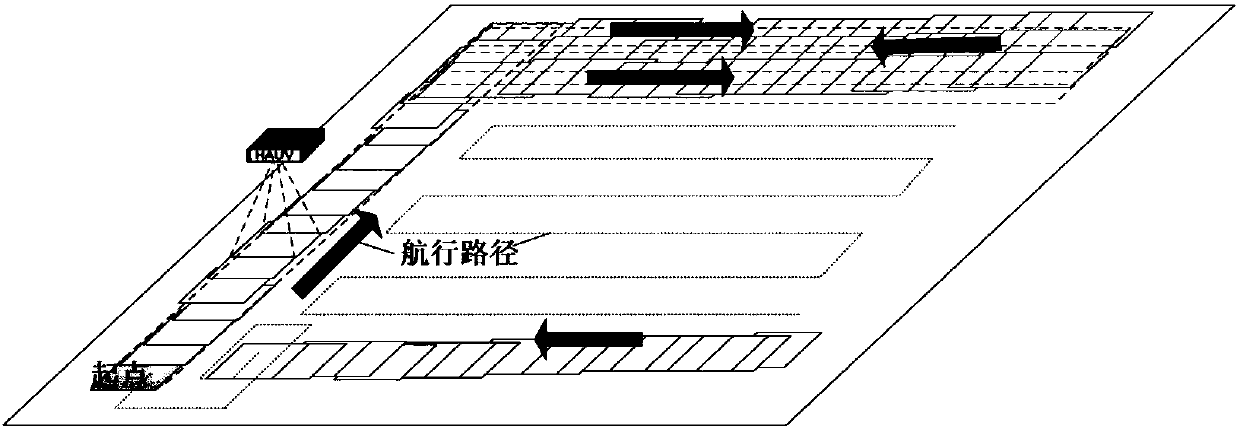
[0043] In one embodiment, HAUV is as figure 1 Carry out the cruise according to the preset navigation path shown, obtain the photos of the terrain in the underwater area, and after arriving at the navigation e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More