

Adaptive neural network control method for arc micro-electromechanical system
A technology of neural network control and micro-electro-mechanical systems, applied in adaptive control, general control systems, control/regulation systems, etc., can solve major safety accidents, difficult to obtain accurate models of control objects, severe economic losses, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0078] Embodiment A kind of self-adaptive neural network control method of curved MEMS, comprises the following steps:
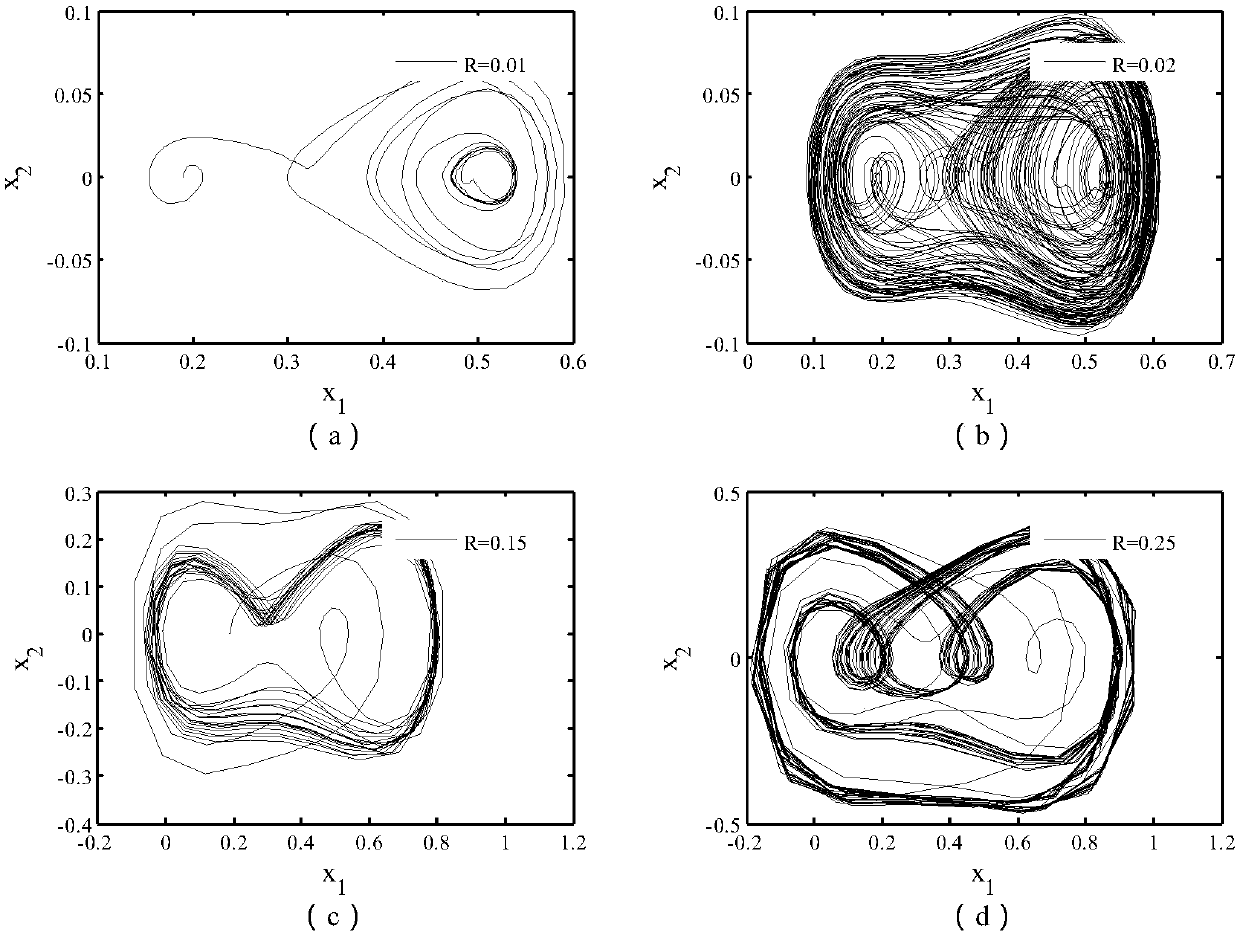
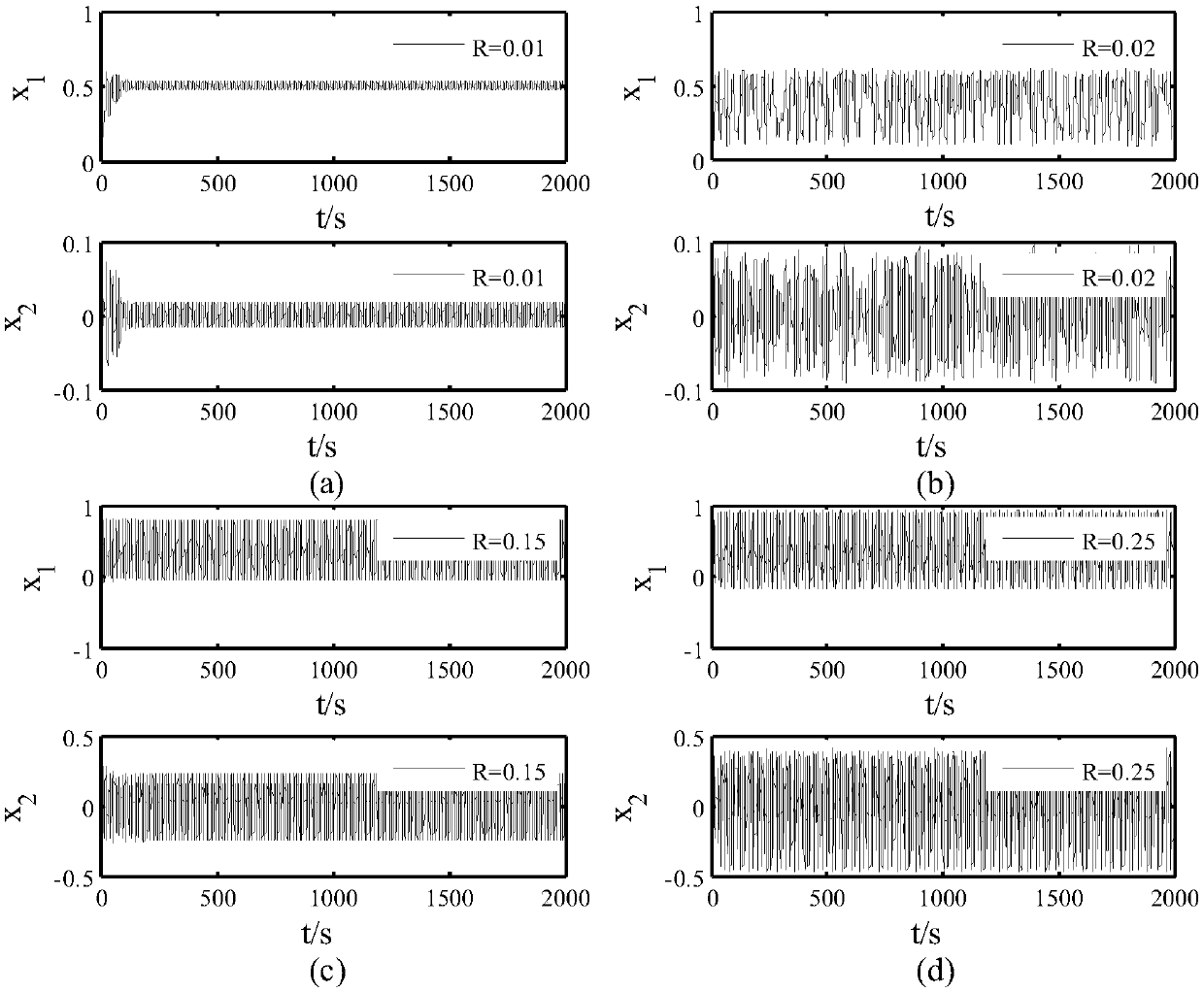
[0079] a. In order to reveal the inherent characteristics of arc-shaped MEMS and facilitate the design of controllers, the phase diagram, time history, maximum Lyapunov exponent and bifurcation diagram are used to study the nonlinear dynamics of arc-shaped MEMS, and the construction is based on Bernoulli beams The system model of arc-shaped MEMS is obtained
[0080]
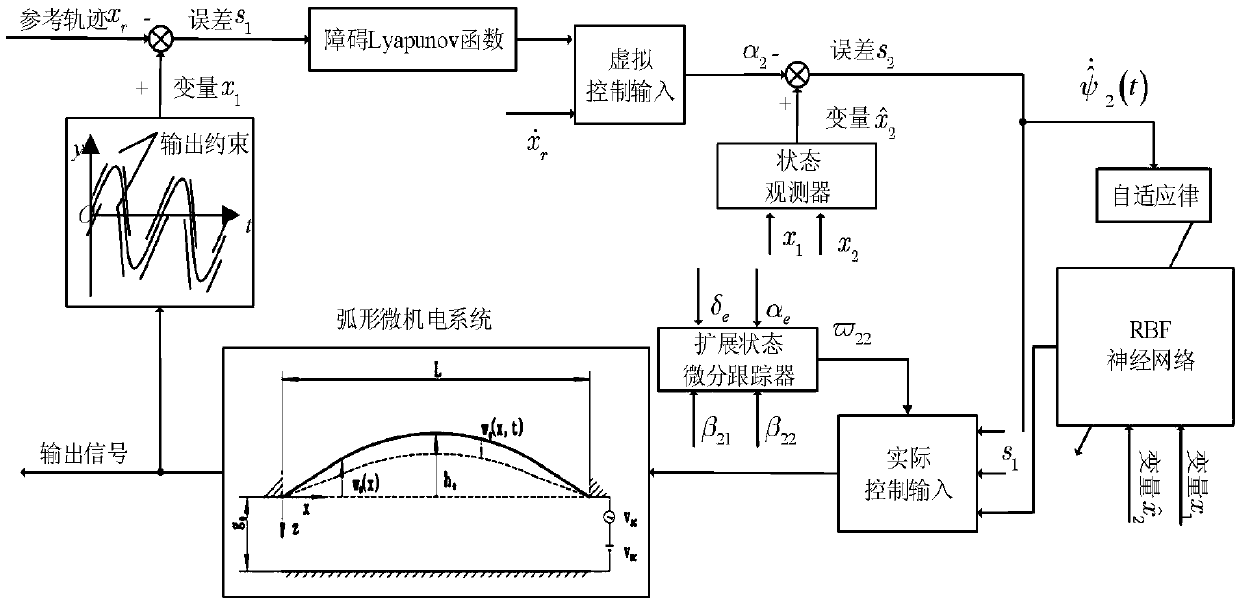
[0081] In formula (1), μ, h, α 1 ,β,R,b 11 Represents dimensionless parameters, q(t) represents state variables, w 0 Represents the frequency, u(t) represents the control input; the schematic diagram of the arc-shaped MEMS is shown in figure 1 shown;
[0082] b. Construct an adaptive neural network controller used to suppress the chaotic oscillation of the arc-shaped MEMS and ensure the system state constraints; when constructing, the symmetrical barrier Lyapunov function is used to ensu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More