A Collision Detection Method for Robot Simulation System
A technology of collision detection and simulation system, which is applied in the field of collision detection of robot simulation systems, can solve problems such as low detection accuracy and slow establishment of collision detection data structures, and achieve wide application range, strong customizability, and targeted detection Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056]The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments.
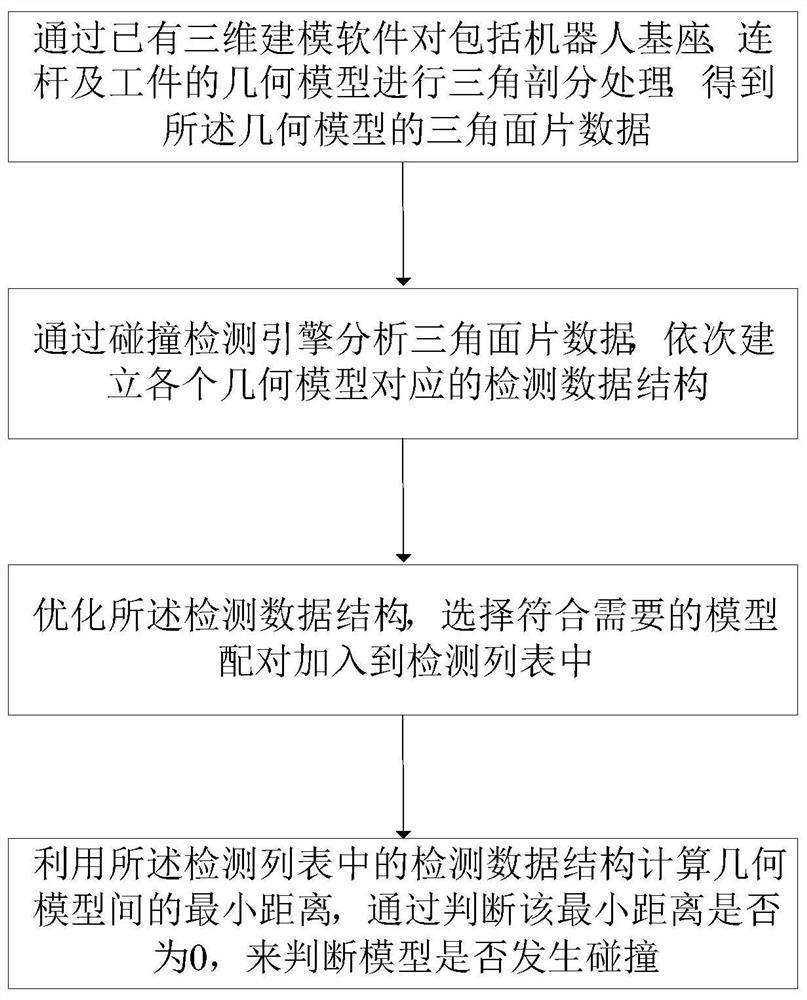
[0057] like figure 1 As shown, a collision detection method for a robot simulation system includes steps:
[0058] Step 1, at first is to process simulation object, carry out triangulation processing to the geometric model comprising robot base, connecting rod and workpiece by existing 3D modeling software (such as OCCT), obtain the triangular surface data of described geometric model;
[0059] Step 2, then analyze the triangular patch data through a collision detection engine (such as a PQP collision detection library), and sequentially establish the detection data structure corresponding to each geometric model;
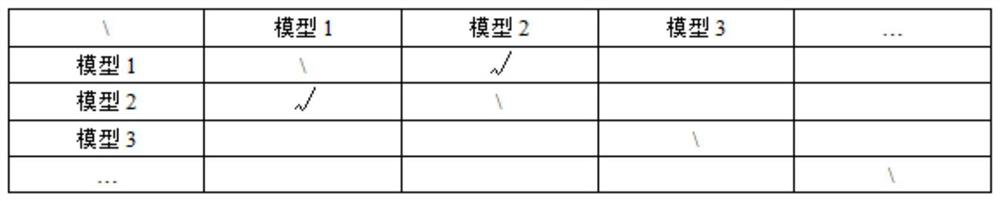
[0060] Step 3. Optimizing the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More