

Real-time path planning method based on vehicle self-organizing network
A vehicle self-organizing network and real-time path planning technology, applied in the field of intelligent transportation, to achieve the effect of high efficiency, strong flexibility, and shortened delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be further described in detail in conjunction with the accompanying drawings and embodiments.
[0044] A real-time path planning method based on vehicle ad hoc network, comprising the following steps:
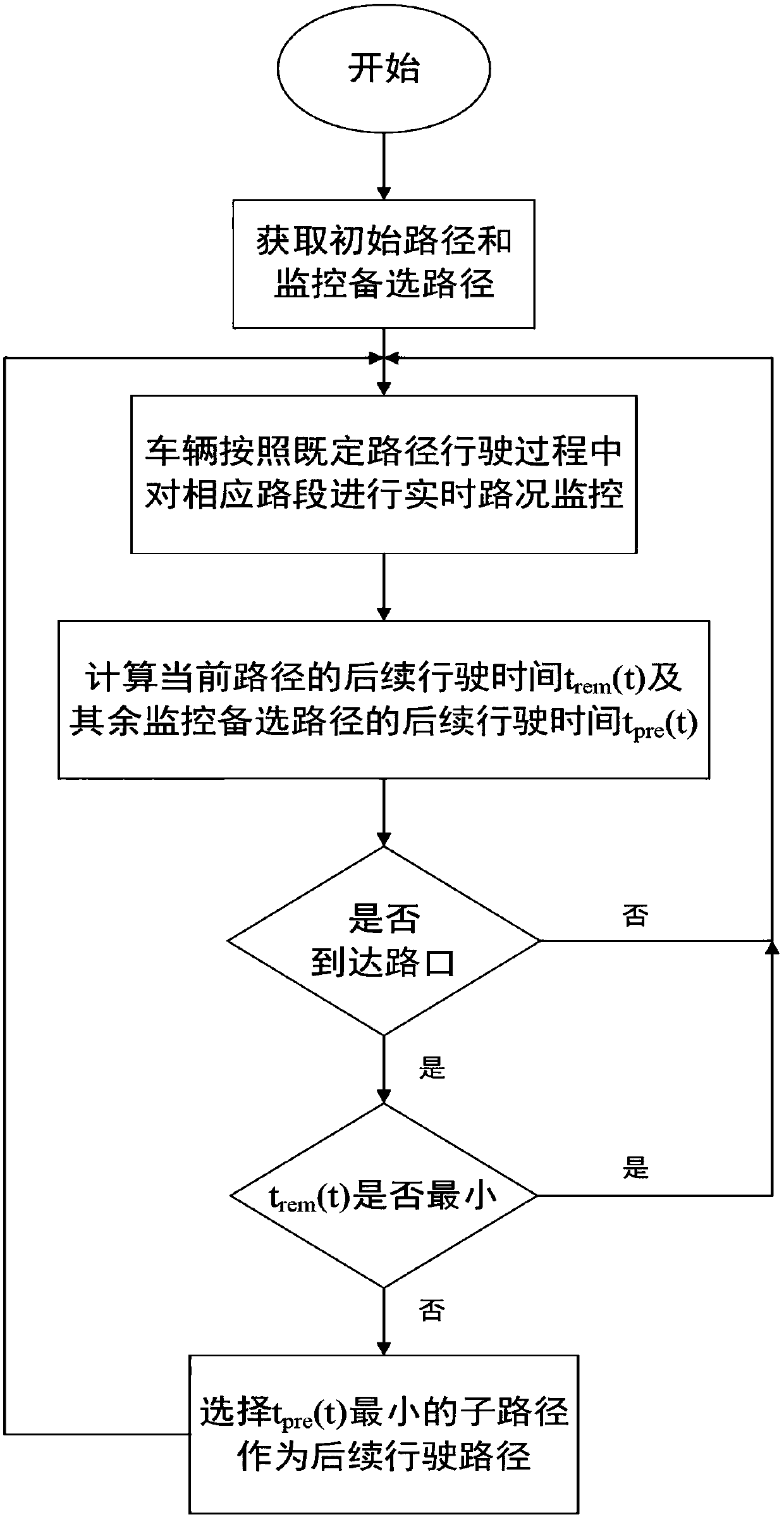
[0045] Step 1. Before the vehicle departs, determine the path with the shortest travel time as the initial travel path, and the remaining paths with the shortest travel distance, high-speed priority, and the least traffic light path as the monitoring alternative paths.
[0046] Step 2: The vehicle nodes obtain real-time road condition information of all road sections that need to be monitored through the vehicle self-organizing network, and update them in real time;
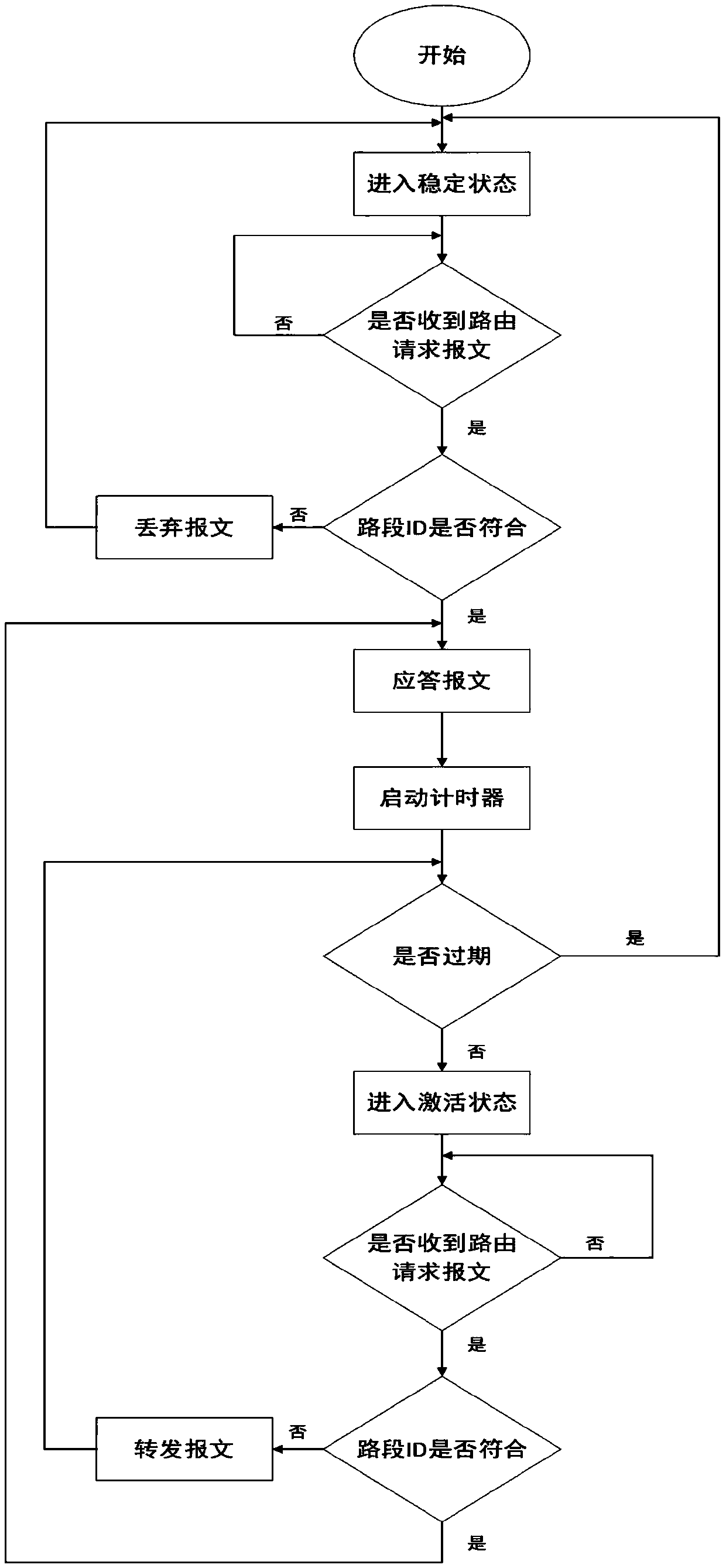
[0047] The vehicle nodes in the vehicle ad hoc network communicate through the on-board unit OBU, and the wireless access method is IEEE802.11p; a single vehicle node regularly exchanges information with other vehicle nodes within the communication range through hello messages, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More