

A Design Method of Control System of Flying Robot Carrying Redundant Manipulator
A technology of flying robot and design method, which is applied in the direction of aircraft, manipulator, program control manipulator, etc., and can solve the problem that the UAV controller is difficult to meet expectations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
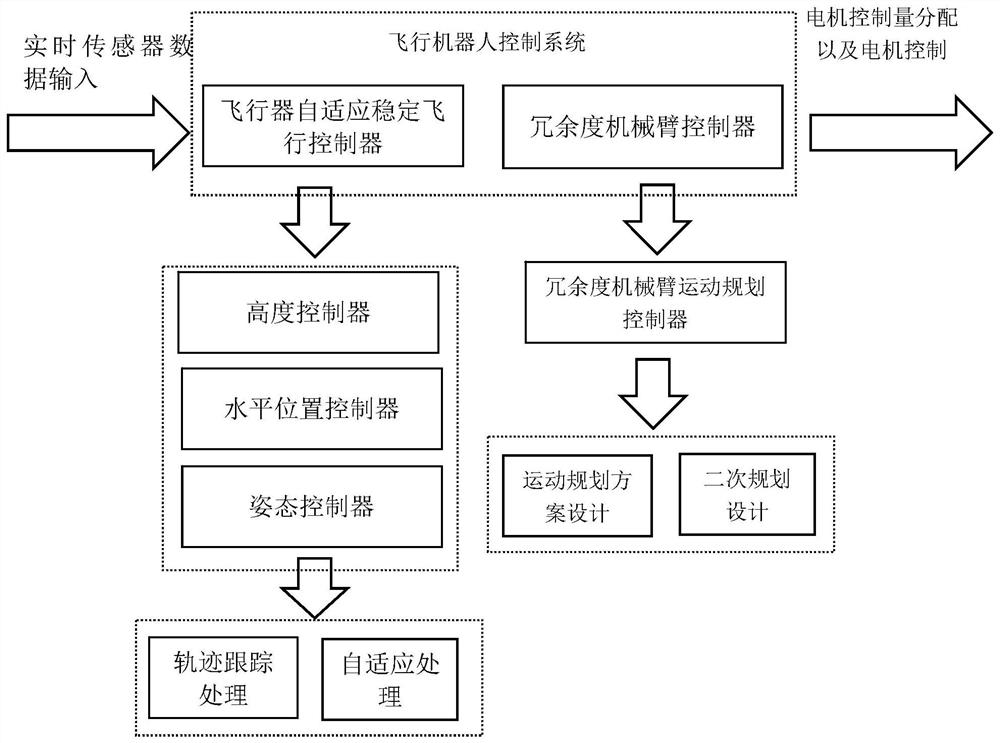
[0077] Such as figure 1 As shown, a design method of a flying robot control system with redundant manipulators is specifically aimed at the design of two aspects of the aircraft adaptive stable flight controller and the redundant manipulator controller, including the following steps:
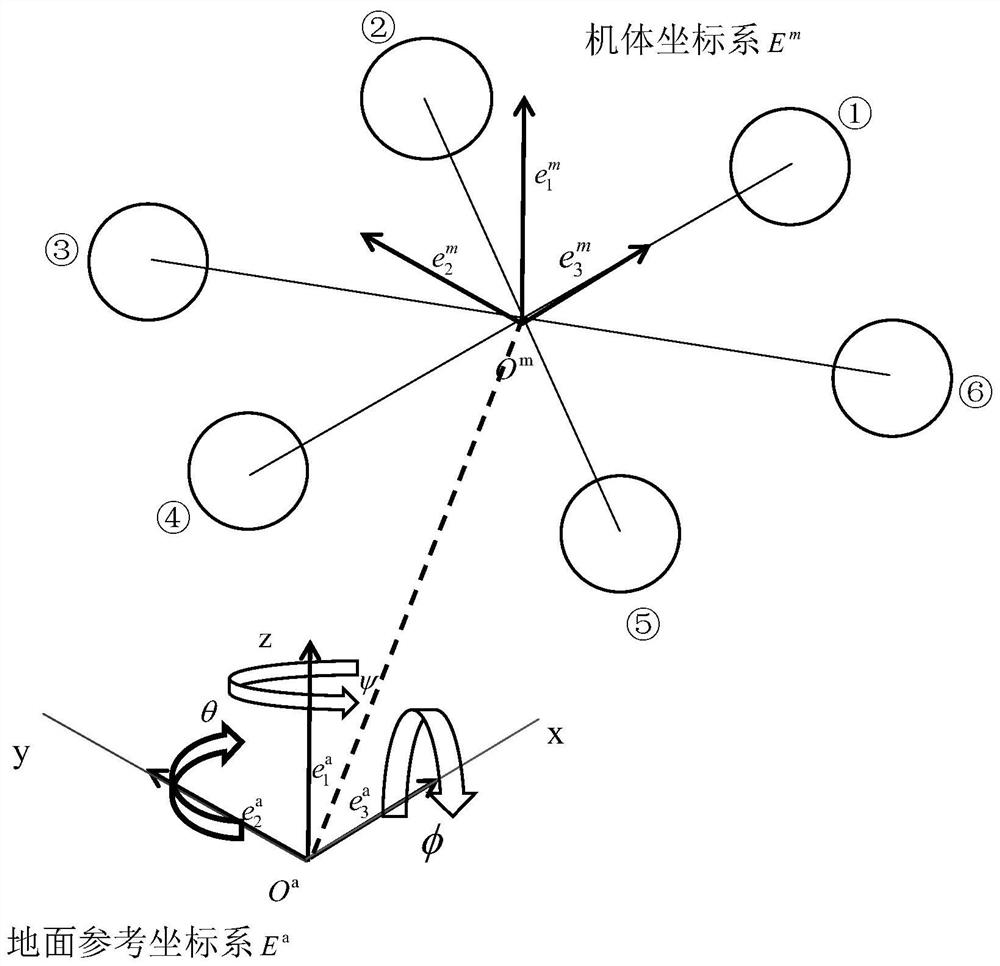
[0078] S1. According to the real-time flight operation data of the flying robot itself obtained by the attitude sensor mounted on the flying robot and the corresponding height and position sensors, the dynamic modeling of the flying robot with redundant mechanical arms is carried out;
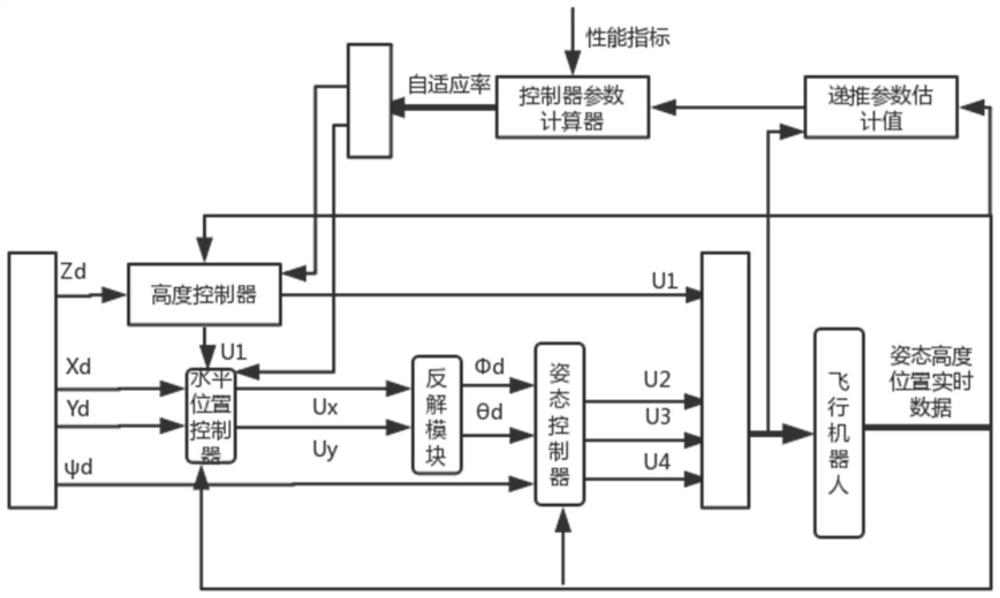
[0079] S2. According to the dynamic equation of the flying robot established in step S1, design a horizontal position controller, a height controller, and an attitude controller, and introduce a virtual control quantity from the lowest order differential equation of the system, and adopt a method based on the Lyapunov stability principle Pushback method, design the virtual control that meets the system stability ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More