

Particle swarm algorithm-based robot path planning method, device and terminal device
A particle swarm algorithm and path planning technology, applied in the direction of navigation calculation tools, etc., can solve the problems of uneven planning path and low efficiency, and achieve the effect of reducing the amount of calculation, improving the calculation efficiency, and improving the optimal solution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
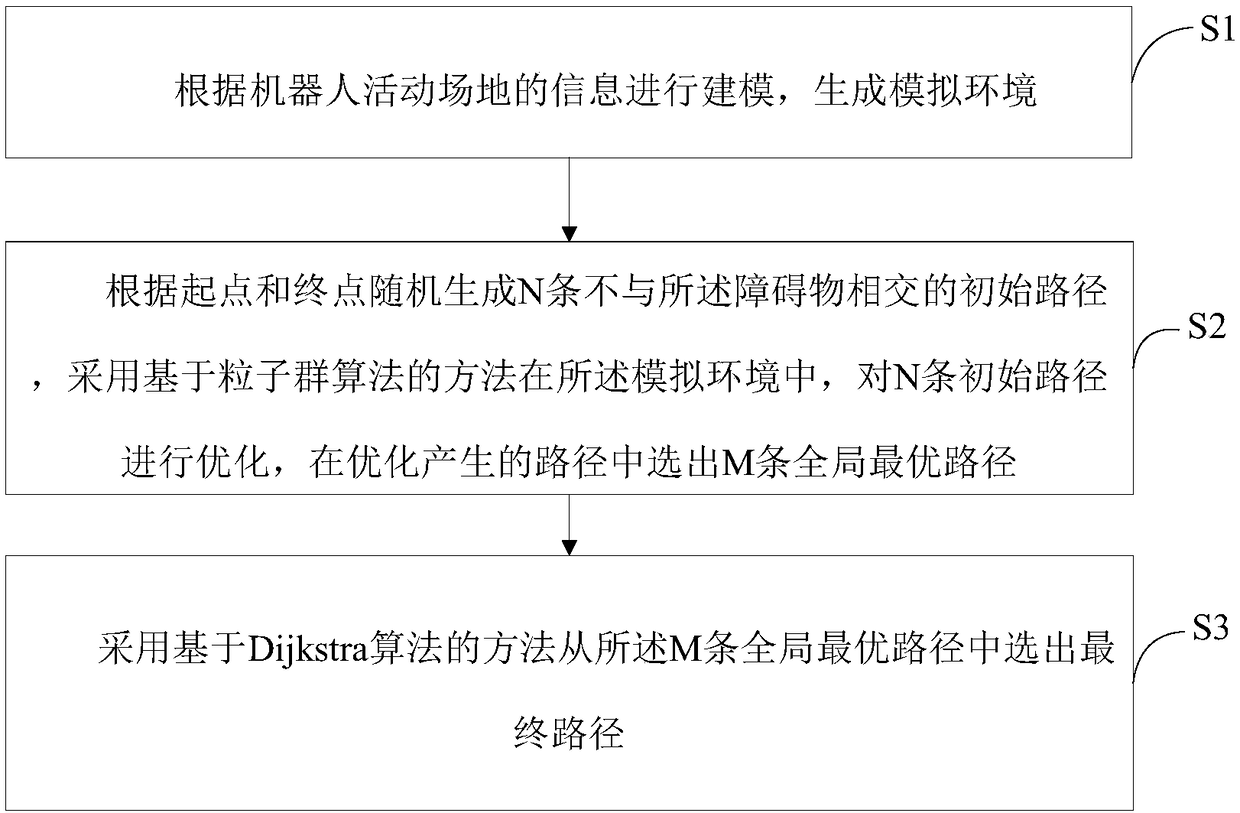
[0026] figure 1 It shows the implementation process of the particle swarm algorithm-based robot path planning method provided by Embodiment 1 of the present invention, and is described in detail as follows:
[0027] In step S1, modeling is carried out according to the information of the robot's activity site, and a simulation environment is generated.
[0028] In an embodiment of the present invention, said modeling and generating a simulated environment based on the information of the robot activity site, that is, the environment modeling process includes:
[0029] Step S101, establishing a Cartesian coordinate system according to the information of the activity site, and determining the start and end points of the robot's activities in the Cartesian coordinate system.
[0030] Optionally, first obtain the information of the robot activity field, wherein the information of the robot activity field includes the positions and shapes of all obstacles in the activity field, the ...
Embodiment 2
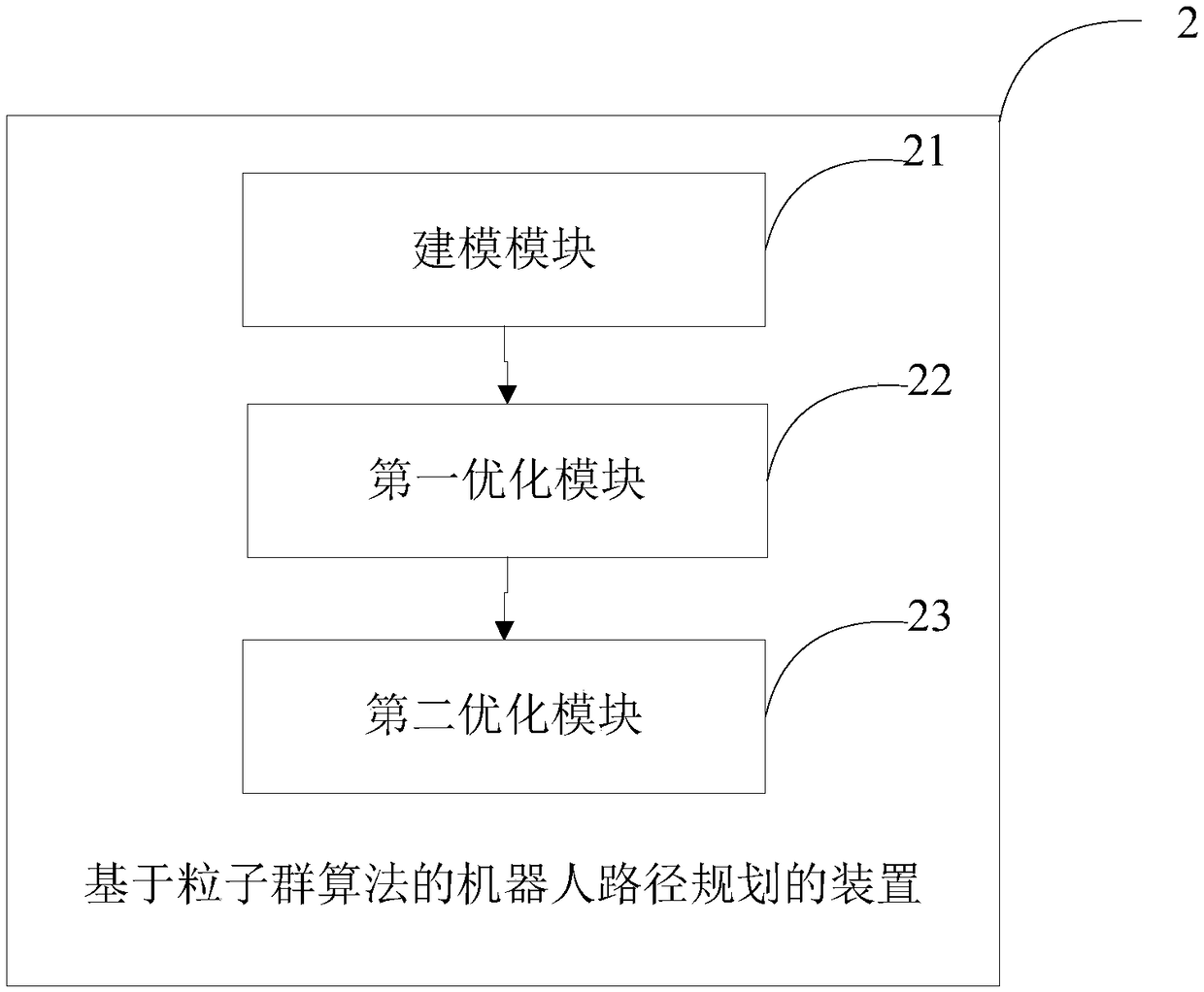
[0076] figure 2 A structural block diagram of a particle swarm algorithm-based robot path planning device provided by an embodiment of the present invention is shown. For ease of description, only parts related to the embodiment of the present invention are shown. The robot path planning device 2 based on particle swarm optimization algorithm includes: a modeling module 21 , a first optimization module 22 and a second optimization module 23 .
[0077] Wherein, the modeling module 21 is used for modeling according to the information of the robot activity site, and generates a simulation environment;
[0078] The first optimization module randomly generates N initial paths that do not intersect with the obstacle according to the starting point and end point of the robot activity, and optimizes the N initial paths in the simulation environment by using a method based on particle swarm optimization algorithm , select M global optimal paths from the paths generated by optimizatio...
Embodiment 3
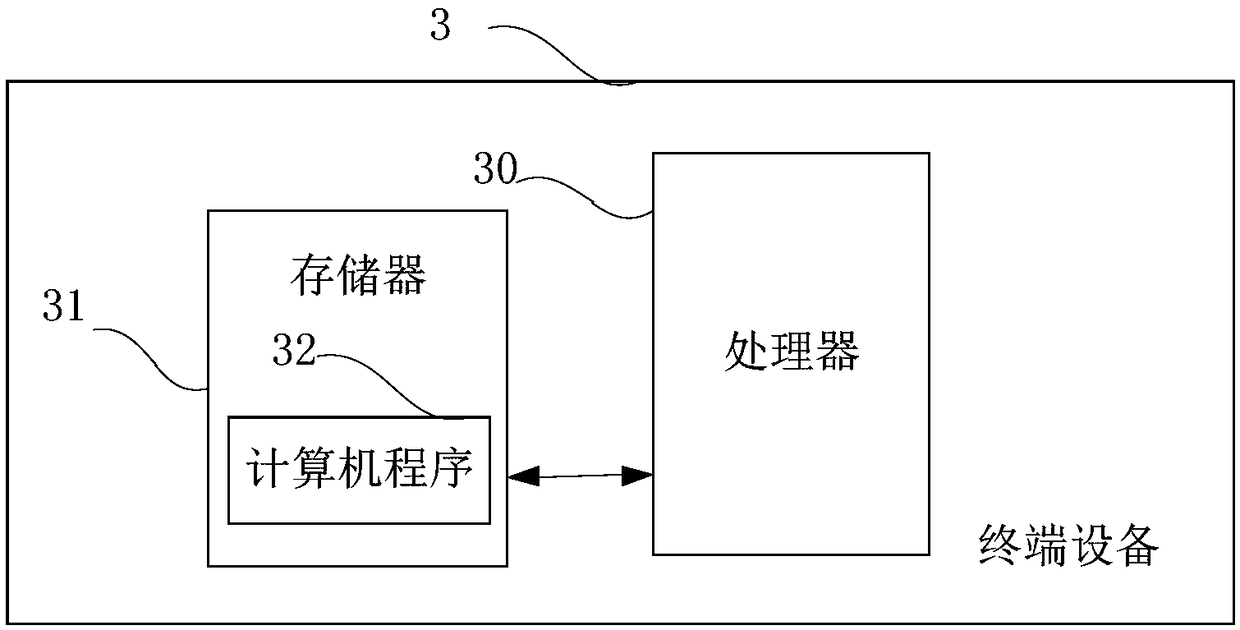
[0103] image 3 It is a schematic diagram of a particle swarm algorithm-based robot path planning terminal device provided by an embodiment of the present invention. Such as image 3 As shown, the robot path planning terminal device 3 based on the particle swarm optimization algorithm of this embodiment includes: a processor 30, a memory 31, and a computer program 32 stored in the memory 31 and operable on the processor 30, for example Robot path planning program based on particle swarm algorithm. When the processor 30 executes the computer program 32, it realizes the steps in the above embodiments of the robot path planning method based on the particle swarm optimization algorithm, for example figure 1 Steps 101 to 103 are shown. Alternatively, when the processor 30 executes the computer program 32, it realizes the functions of the modules / units in the above-mentioned device embodiments, for example figure 2 Functions of modules 21 to 23 shown.
[0104] Exemplarily, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More