Vehicle trajectory prediction method and device based on driver's control intention and system
A trajectory prediction, driver technology, applied to devices and systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
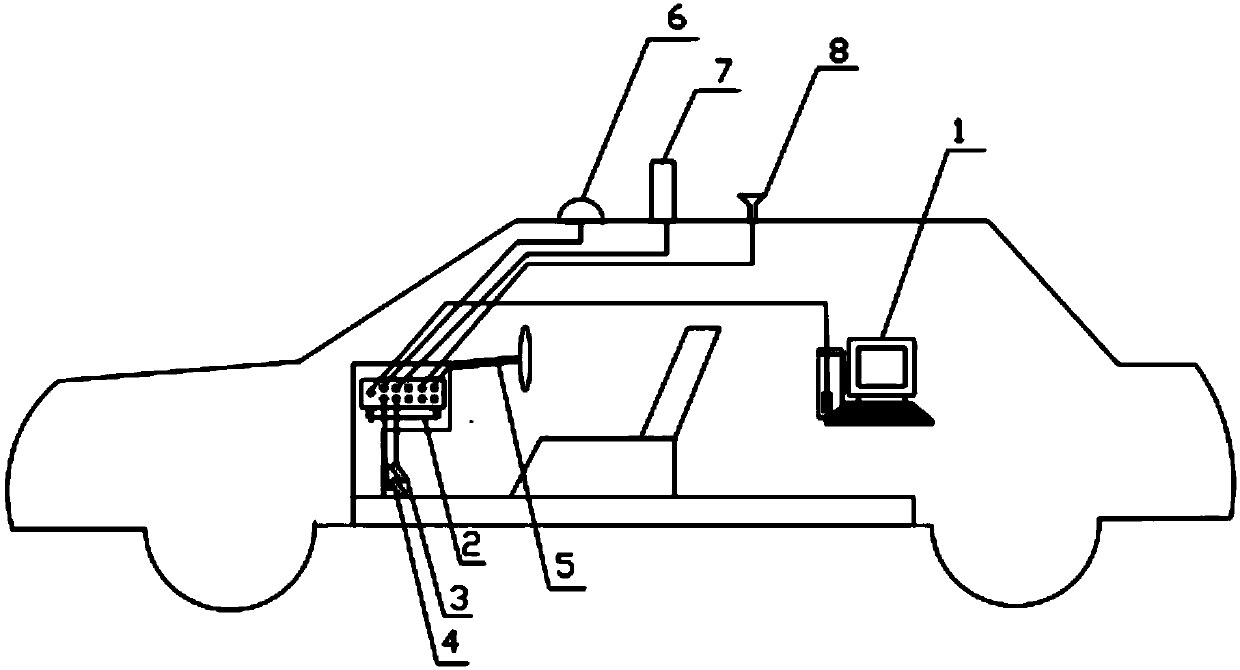
[0048] Such as figure 1 Shown is a schematic structural diagram of this embodiment. Among them, computer 1, CAN bus 2, accelerator pedal 3, brake pedal 4, steering wheel 5, camera 6, radar 7, GPS8.
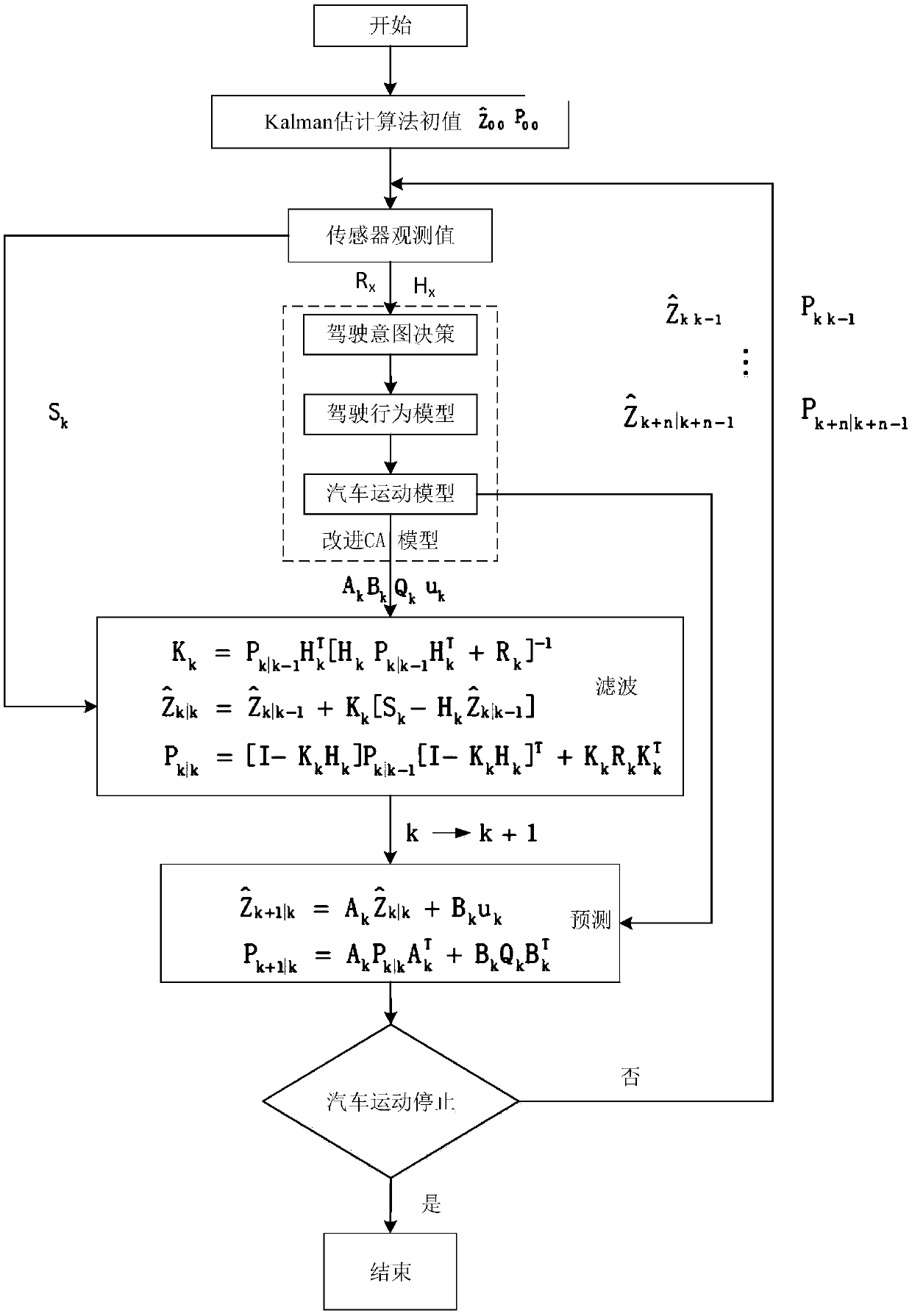
[0049] Such as figure 2 As shown, the vehicle trajectory prediction method based on the driver's manipulation intention in this embodiment specifically includes the following steps:
[0050] Step 1: Use the on-board equipment and roadside equipment to obtain the current state of motion (position, speed, acceleration) of the vehicle on the road and the driver's operation intention (acceleration pedal, brake pedal and turn signal);
[0051] Step 2: Obtain the driver's expected control quantity sequence, that is, quantify the driver's control intention.
[0052] In this embodiment, the quadratic theory is used to express the utility function of the driver's expected control amount as a discretized form: In the formula, Q is the error weight of the state quantity, R is the weigh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com