

Mechanical arm space trajectory optimization method for optimal time under multiple constraint conditions
An optimal time and trajectory optimization technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as not considering constraints, not being able to obtain the optimal solution of time, and easily falling into local extremum, etc., to achieve increased The effect of diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with accompanying drawing.
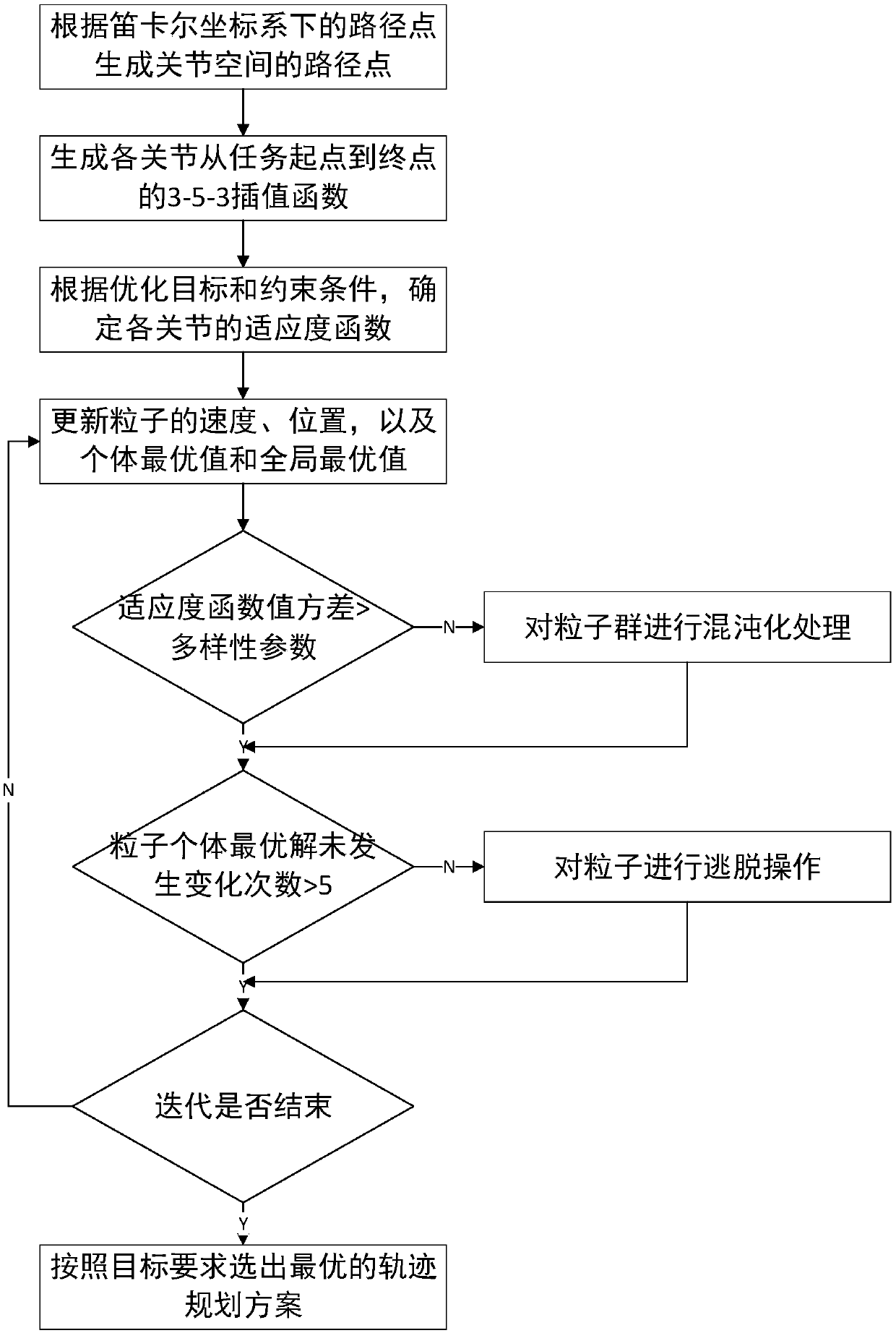
[0060] figure 1 It is a flow chart of the method of the present invention, combined with figure 1 Shown:
[0061] 1. Generate path points in joint space based on path points in the Cartesian coordinate system
[0062] Convert the trajectory in the Cartesian coordinate system of the end effector of the manipulator to the angle change in the joint coordinate system, and set the path point θ that the manipulator needs to pass through to complete the entire trajectory:
[0063] θ={θ sr |s=1,...m; r=1,...n+1}
[0064] Among them, θ sr Indicates the position of the rth waypoint of the sth joint, m is the number of joints of the robot arm, and n+1 is the number of waypoints.
[0065] 2. Generate a 3-5-3 interpolation function for each joint from the start point to the end point of the task
[0066] Assuming that a joint of the manipulator moves from two points B and C on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More