

Robot positioning and map construction system based on binocular vision features and IMU information
A technology for robot positioning and map construction, applied in the field of robotics, can solve the problems of poor robustness, poor adaptability, and low accuracy, and achieve the effects of high accuracy, strong adaptability, and improved robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
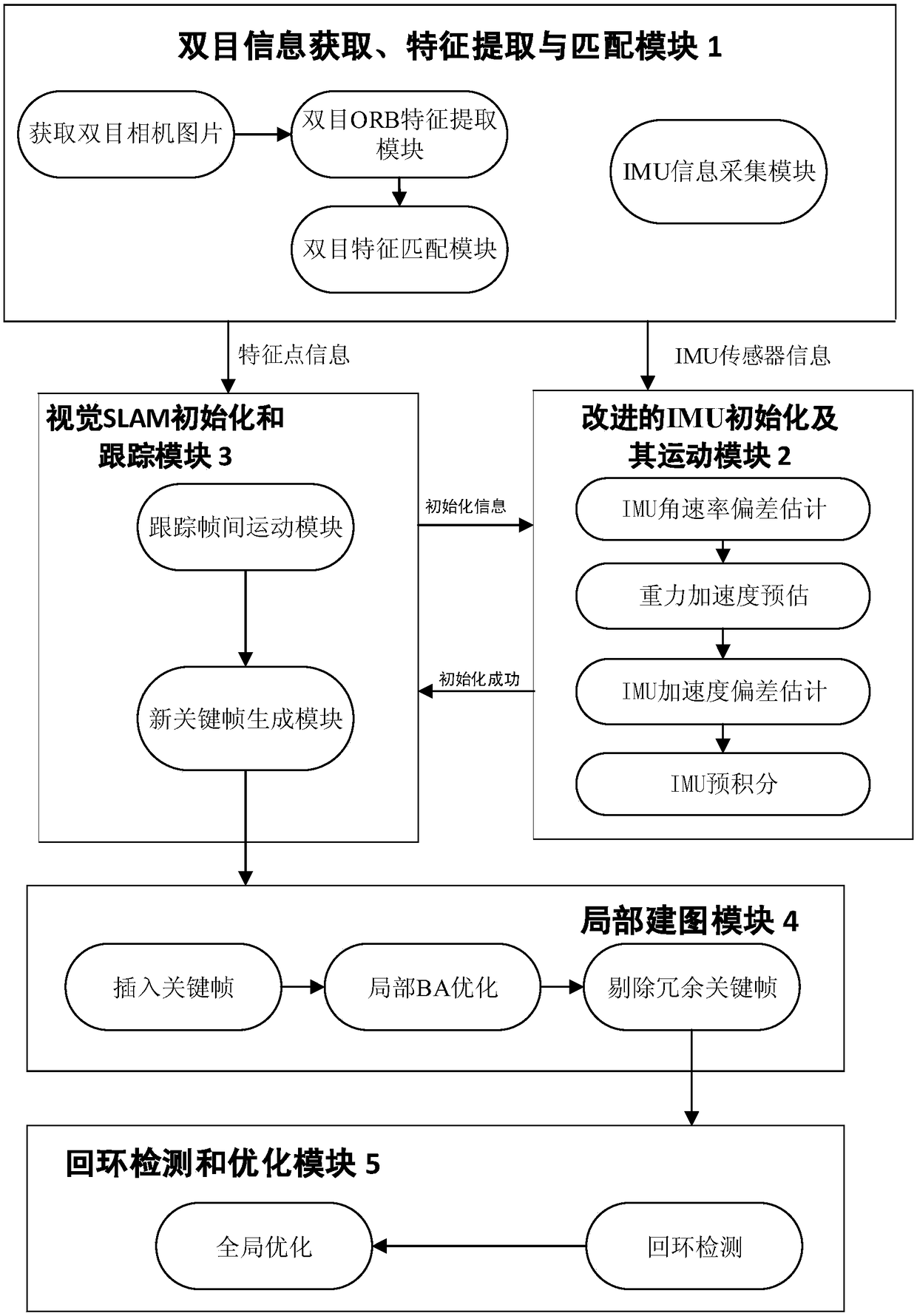
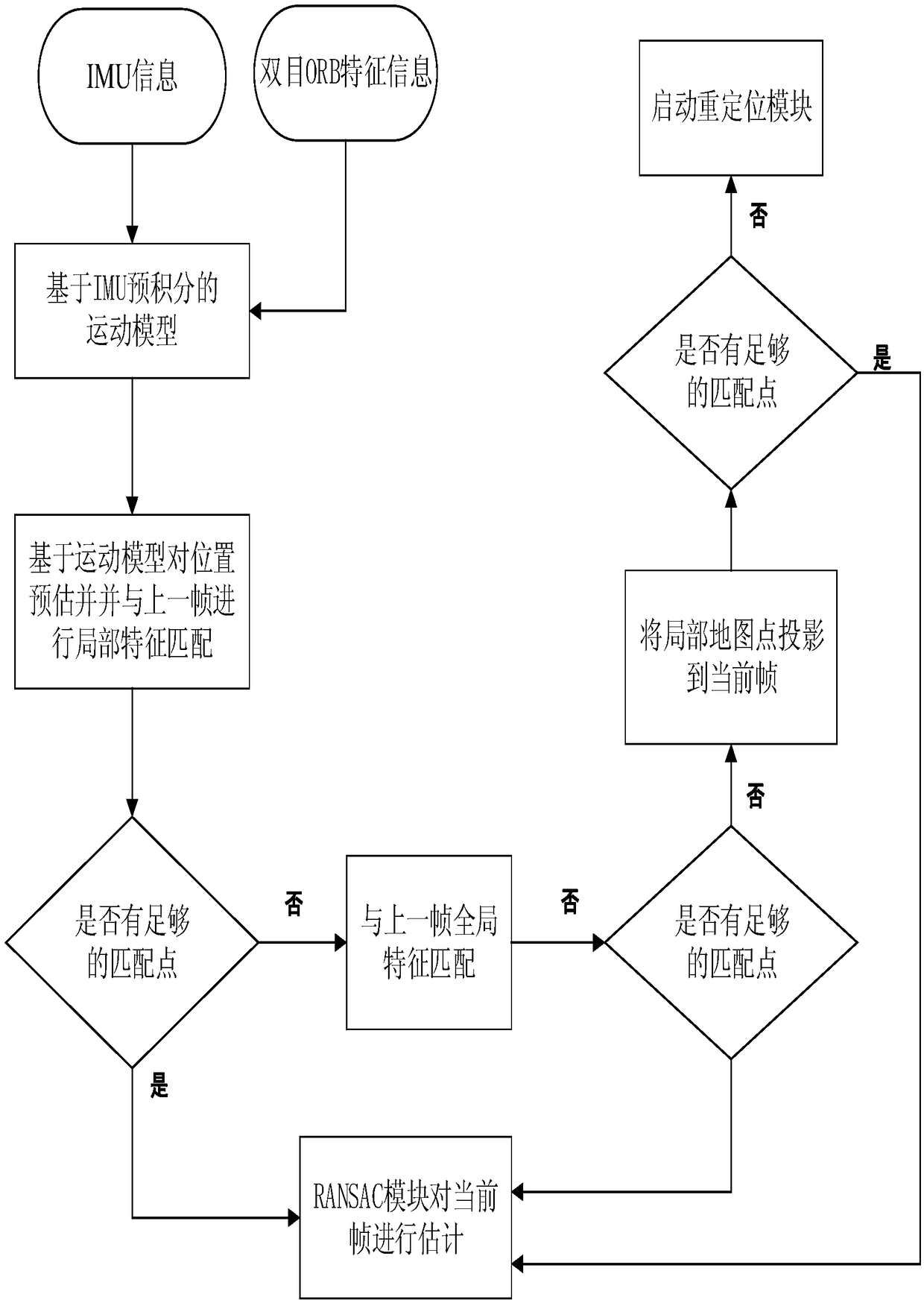
[0019] refer to figure 1 and figure 2 , a robot positioning and map construction system based on binocular visual features and IMU information, including: binocular information collection, feature extraction and matching module (1), improved IMU initialization and motion module (2), visual SLAM algorithm Initialization and tracking module (3), local mapping module (4), loop detection and optimization module (5); described binocular information collection, feature extraction and matching module (1) include: binocular ORB feature extraction submodule ( 1.1), binocular feature matching submodule (1.2), IMU information acquisition submodule (1.3); the improved IMU initialization and its motion module (2) include: IMU angular rate deviation estimation submodule (2.1), acceleration of gravity Estimation sub-module (2.2), IMU acceleration deviation estimation sub-module (2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More