

Using method for controlling rubber tapping robot through network
A network control and robot technology, applied in application, forestry, agriculture, etc., can solve the problems of high labor intensity and low rubber tapping efficiency, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The present invention will be further described below in conjunction with the drawings and specific embodiments:
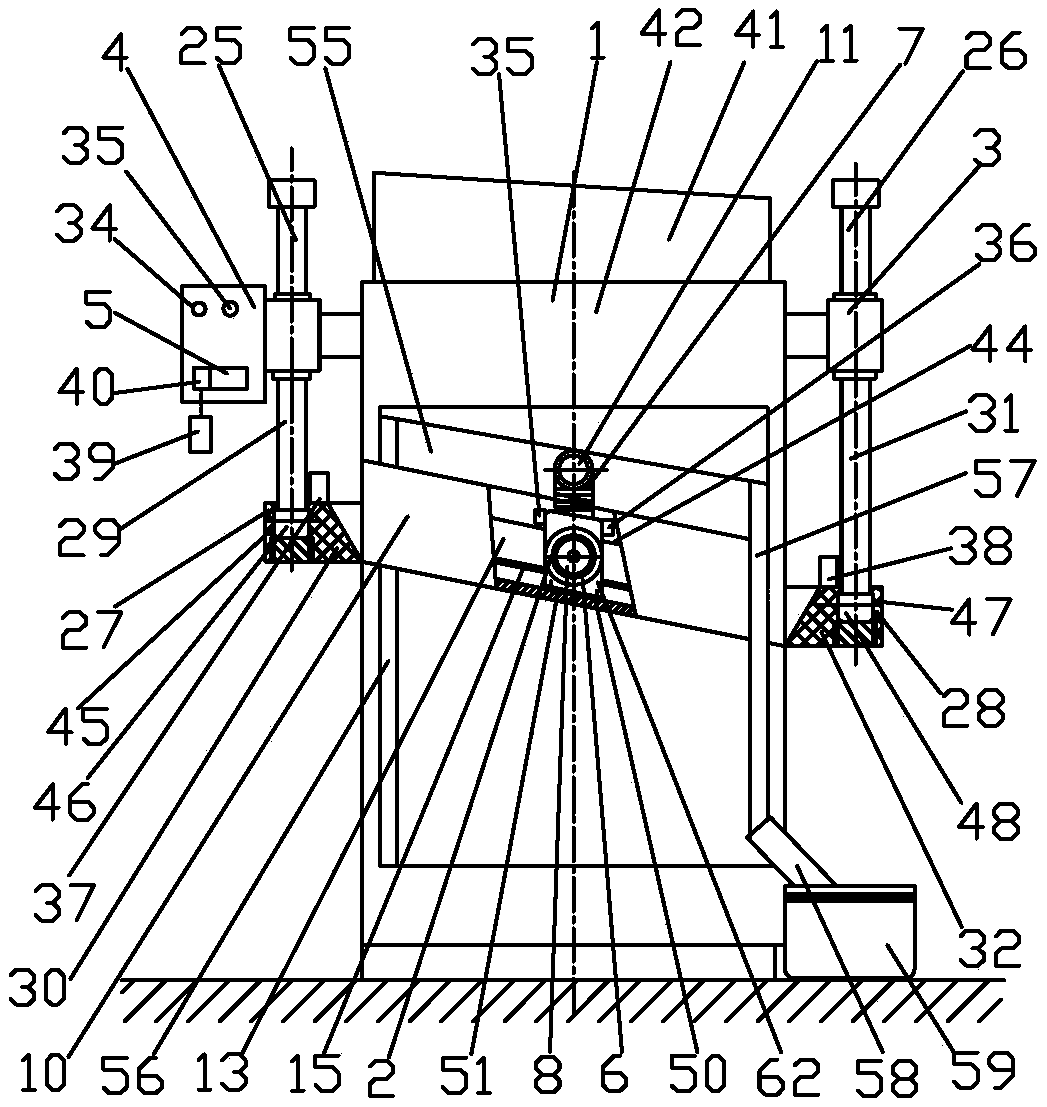
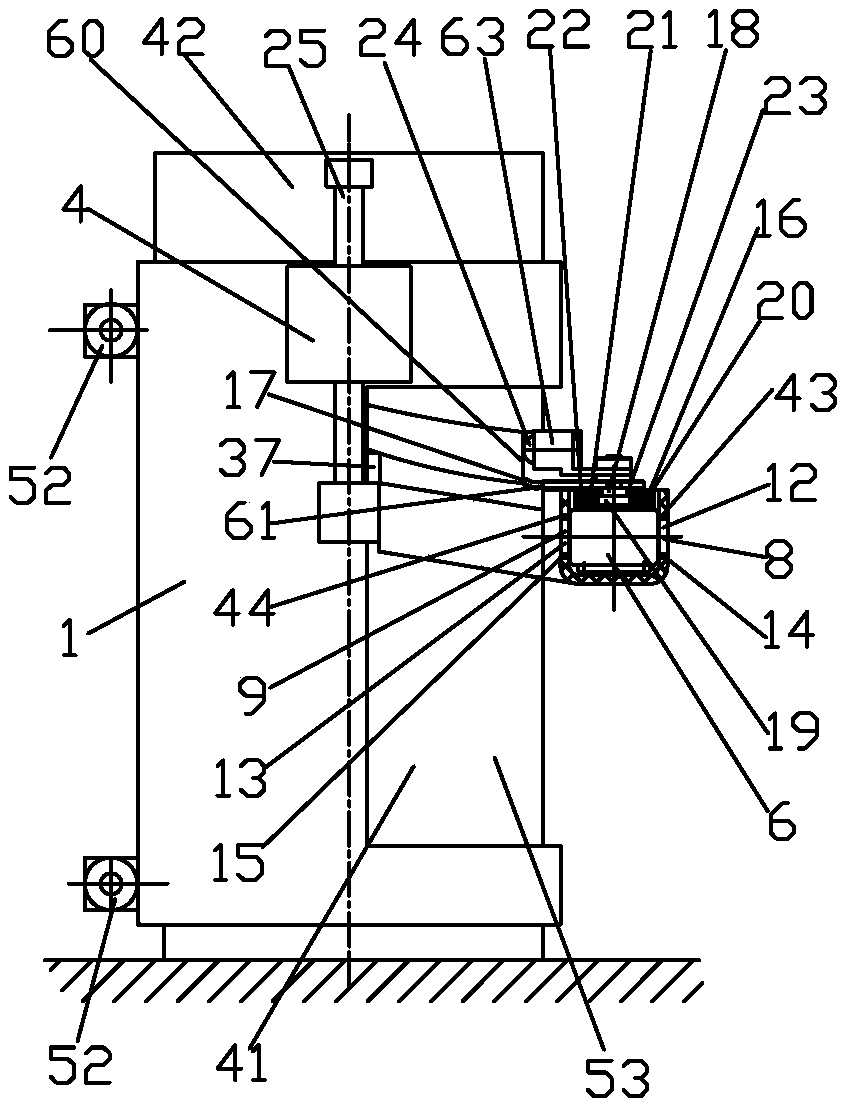
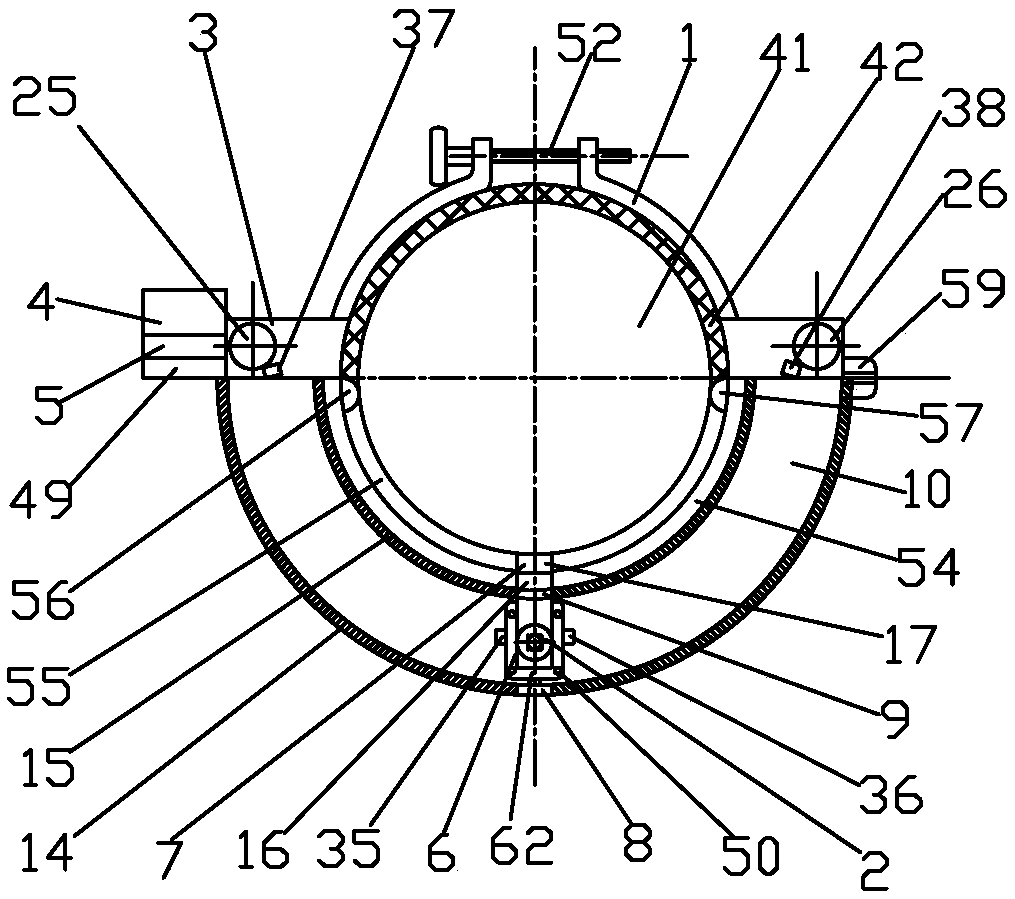
[0011] Such as figure 1 The structure diagram of the network controlled rubber tapping robot shown, figure 2 Shown figure 1 Left view and image 3 Shown figure 1 The top view of the network control rubber tapping robot, including the tree wrapping hoop 1, the rubber tapping manipulator 2, the lifting device 3, the controller 4, and the network communication device 5. The lifting device 3 is connected with the tree wrapping hoop 1, and the rubber tapping robot 2 is connected with the lifting device 3. The rubber tapping manipulator 2 includes a motor 6, an elastic rubber tapping knife 7, a front gear 8, a rear gear 9, an arc-shaped groove 10, and a follower 11; the frame 62 of the motor 6 and the arc-shaped groove 10 are connected in a dynamic fit; arc The groove 10 is provided with a front guide groove 12 and a rear guide groove 13, the front guide groove 12 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More