Networked under-actuated unmanned boat distributed formation controller and design method thereof
An underactuated, unmanned boat technology, applied in the field of unmanned boat control, can solve the problems of heavy neural network computing burden, guidance signals that do not consider system state constraints, input constraints, energy constraints, and unfavorable engineering implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
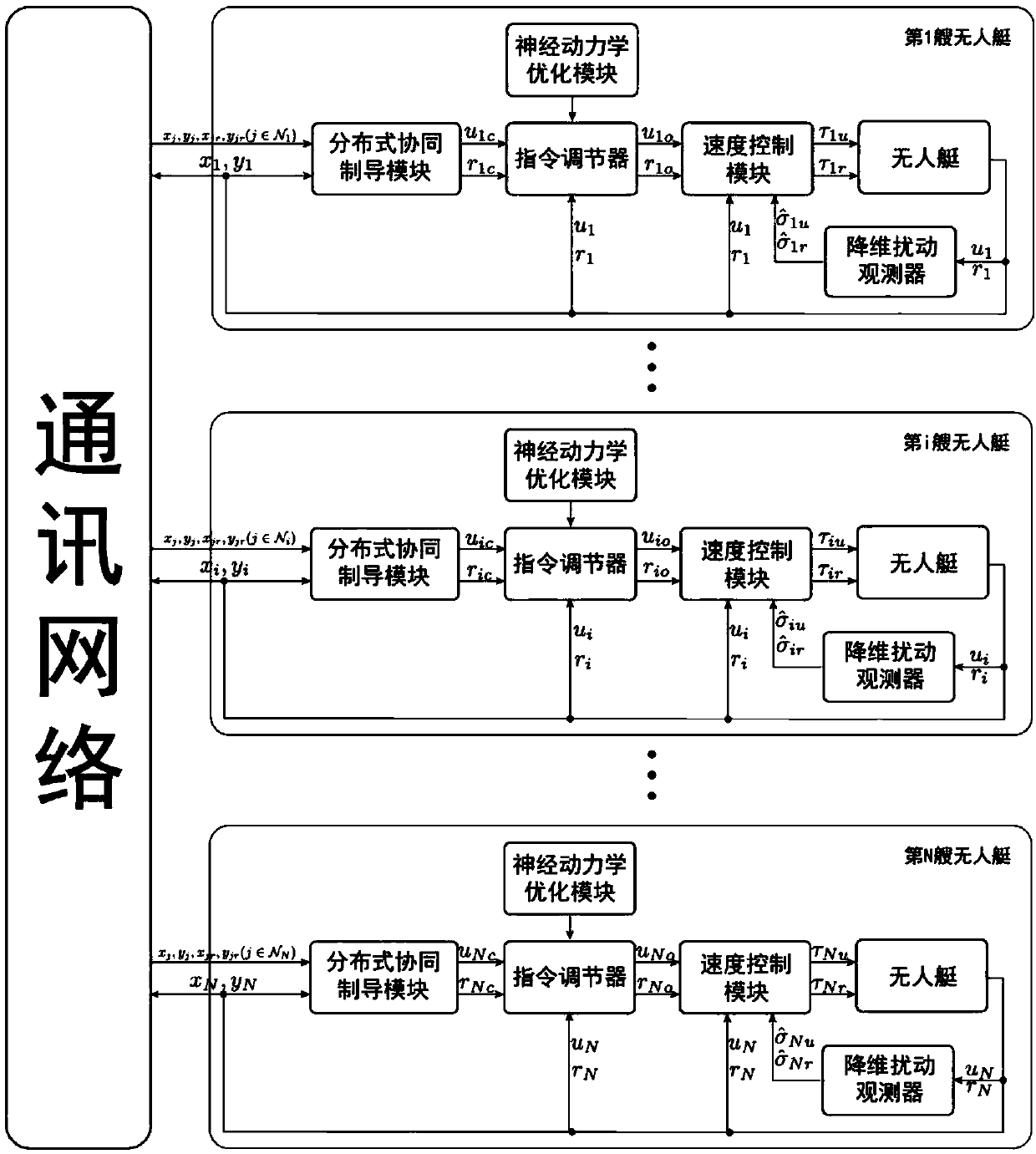
[0056] In the following, the present invention will be further described by taking a communication network composed of five underactuated unmanned boats and three virtual leaders as an example in conjunction with the accompanying drawings. figure 1 Shown is a schematic structural diagram of the networked underactuated unmanned boat distributed formation controller proposed by the present invention, each underactuated unmanned boat in the underactuated unmanned boat formation system satisfies the kinematics and Kinetic model. In this example simulation, there are five underactuated UAV nodes and two virtual leader nodes. Among them, No. 1, No. 3 and No. 5 under-actuated UVs can directly obtain the virtual leader information, No. 2 and No. 4 under-actuated UVs can only receive the location information of neighbor under-actuated UVs. The control target in this example is Five underactuated UAVs can track a given parameterized path curve and maintain a triangular formation forma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com