

A monocular camera scale estimating method based on a quadrotor unmanned aerial vehicle (UAV)
A quadrotor UAV, scale estimation technology, applied in the field of monocular vision, can solve the problem that the scale estimation of monocular camera cannot be effectively achieved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention will be further described below in conjunction with accompanying drawing:
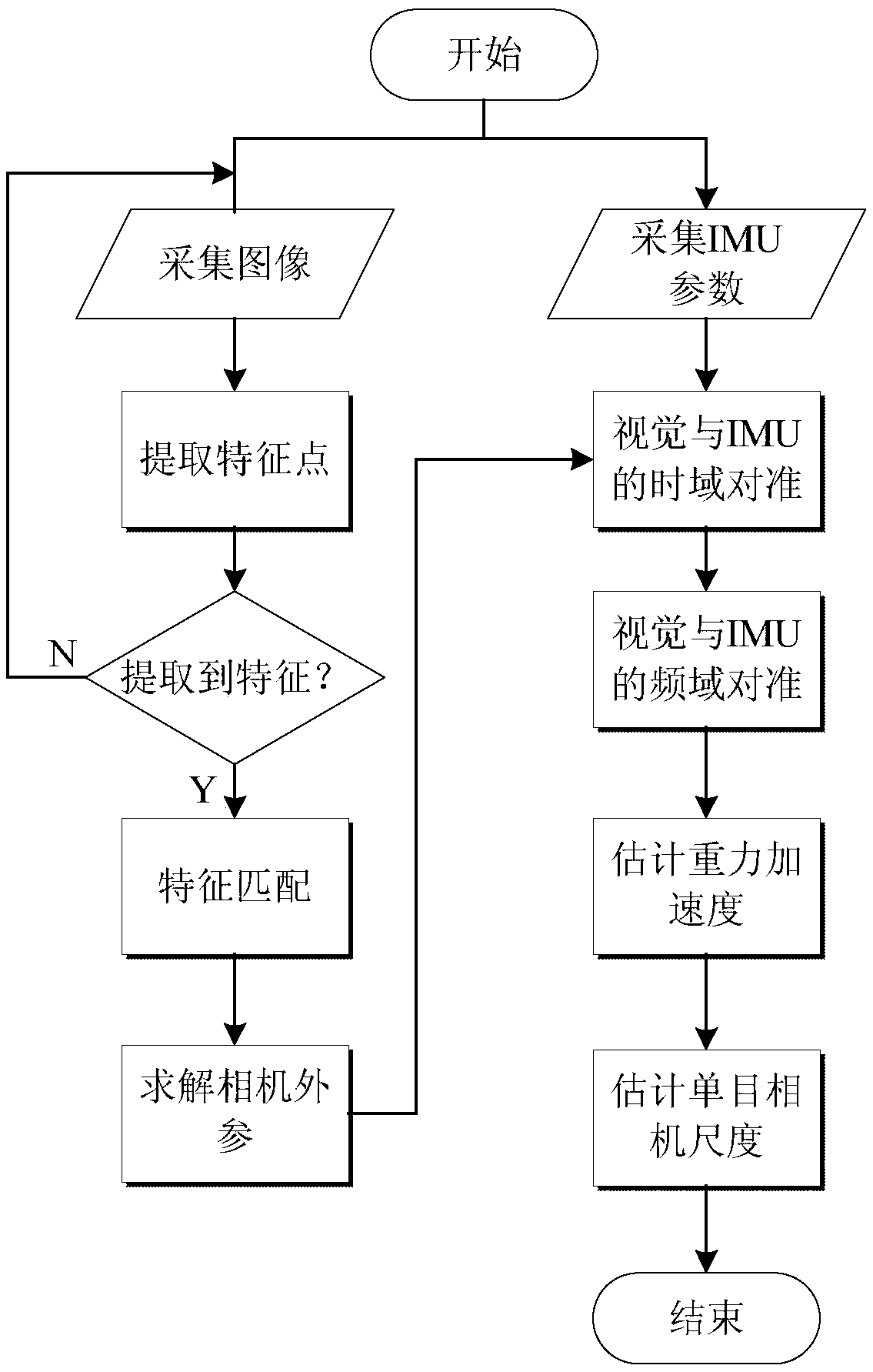
[0099] refer to Figure 1 ~ Figure 3 , a monocular camera scale estimation method based on a quadrotor UAV, including the following steps:
[0100]1) Obtain image and IMU parameter information, the process is as follows:
[0101] 1.1) Collect images
[0102] Generally speaking, there are many methods for collecting images. The present invention is based on the Linux development environment of the quadrotor aircraft platform, and uses the robot operating system ROS to subscribe to image topics to obtain images. The camera driver is realized by ROS and openCV; including: Timestamp, picture;
[0103] 1.2) Obtain IMU parameters
[0104] Same as the image acquisition method, the IMU acquisition is also based on the Linux development environment of the quadrotor aircraft platform, and the IMU parameters are obtained by using the robot operating system ROS to subscribe to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More