

Unmanned aerial vehicle image positioning and attitude determination method and unmanned aerial vehicle
A technology of image positioning and UAV, which is applied in the field of UAV, can solve the problems that distortion is difficult to correct correctly, the number of images is huge, and the efficiency is low, so as to improve the accuracy and stability, reduce the amount of calculation, and improve the accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to further explain the technical means and effects adopted by the present application to achieve the intended purpose of the invention, the specific implementation, structure, features and effects of the present application will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
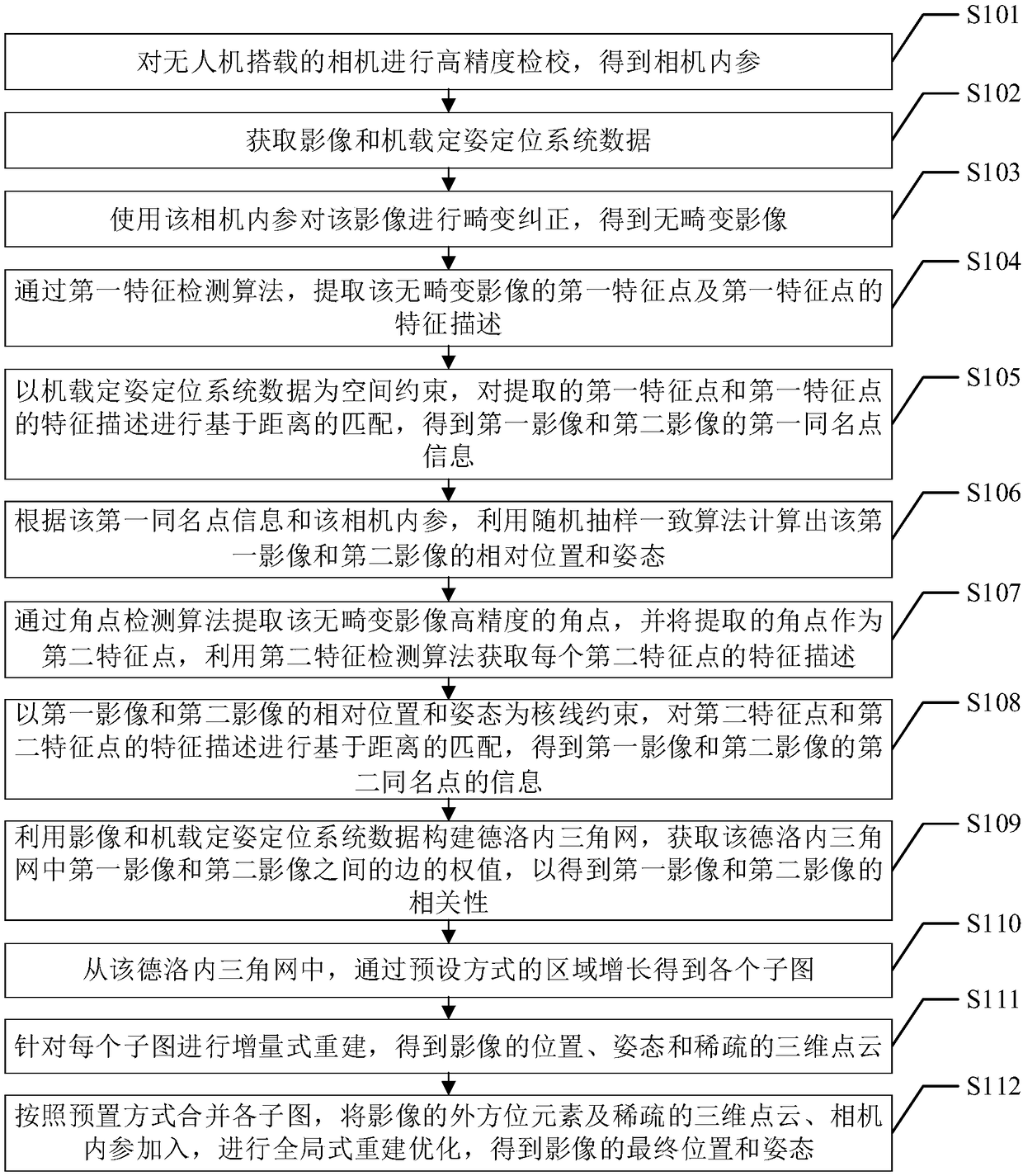
[0024] see figure 1 , figure 1 It is a schematic flow chart of the UAV image positioning and attitude determination method provided by the present invention. The method includes:
[0025] S101. Perform high-precision calibration on the camera carried by the drone to obtain the internal reference of the camera;
[0026] Before leaving the factory, the drone needs to carry out high-precision calibration on its camera according to the preset calibration method to obtain accurate camera internal parameters, including focal length, principal point of image and distortion parameters.
[0027] Specifically, the camera is calibrated with h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More