

Unmanned aerial vehicle deception route planning method based on ant colony algorithm
An ant colony algorithm and route planning technology, applied in vehicle position/route/altitude control, calculation, calculation model and other directions, can solve the problems of poor terrain adaptability and control accuracy, deceive acceleration and speed, etc., and achieve strong terrain adaptability. , the effect of improving the control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0040] Specific implementation mode one: the specific process of a method for planning a UAV deception route based on ant colony algorithm in this implementation mode is as follows:
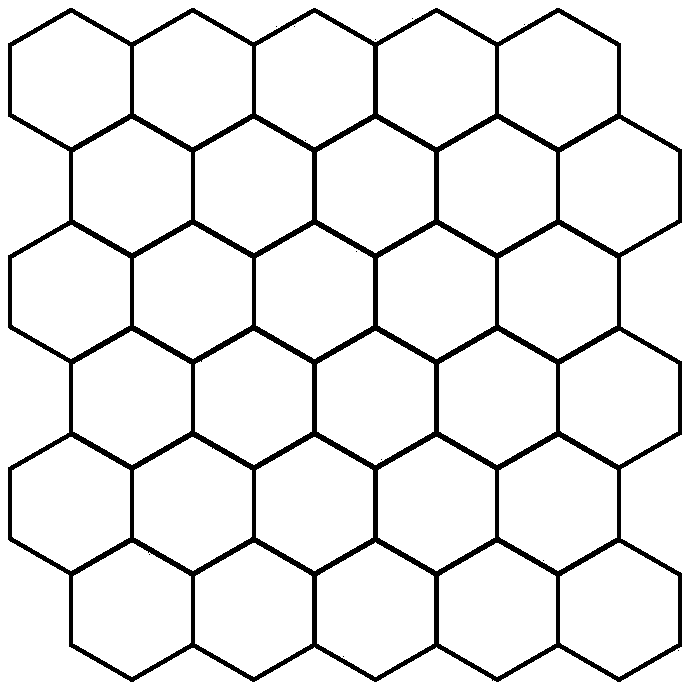
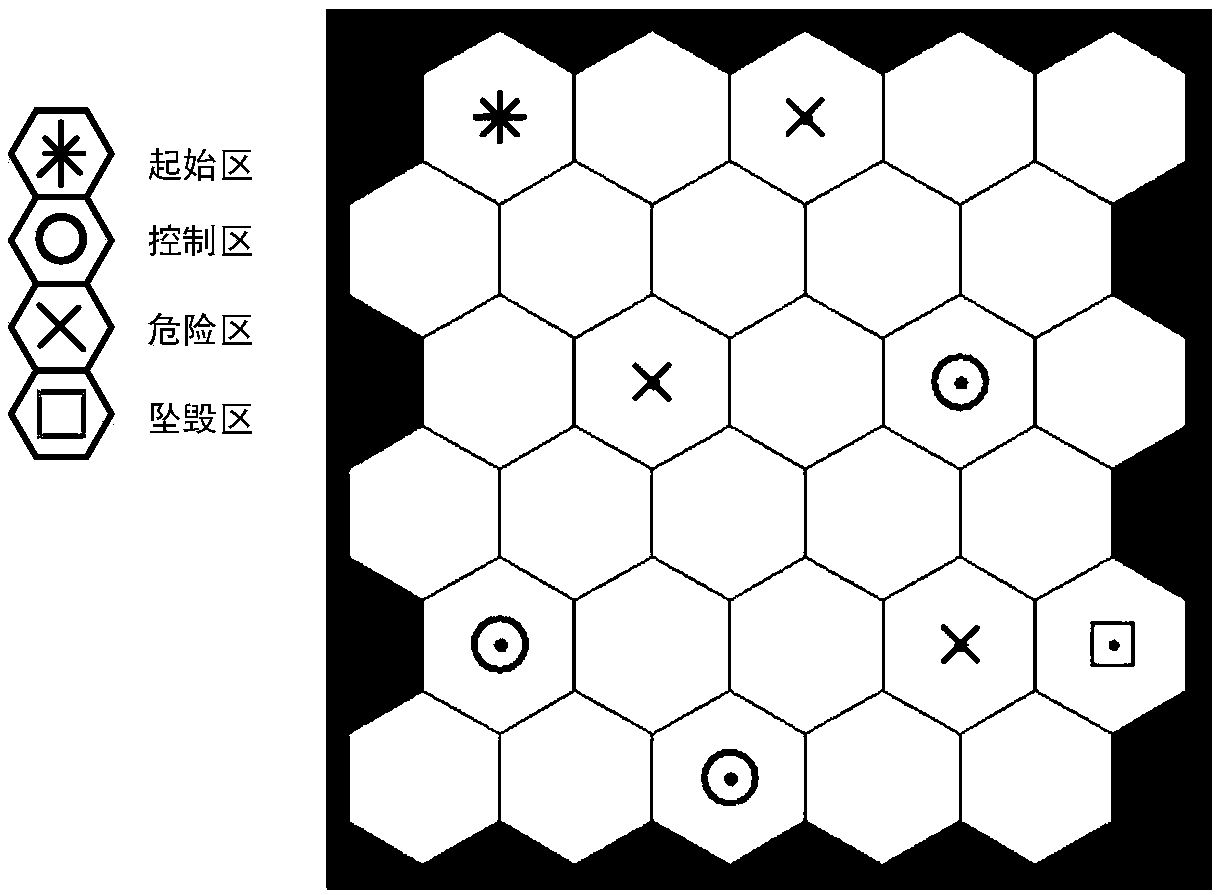
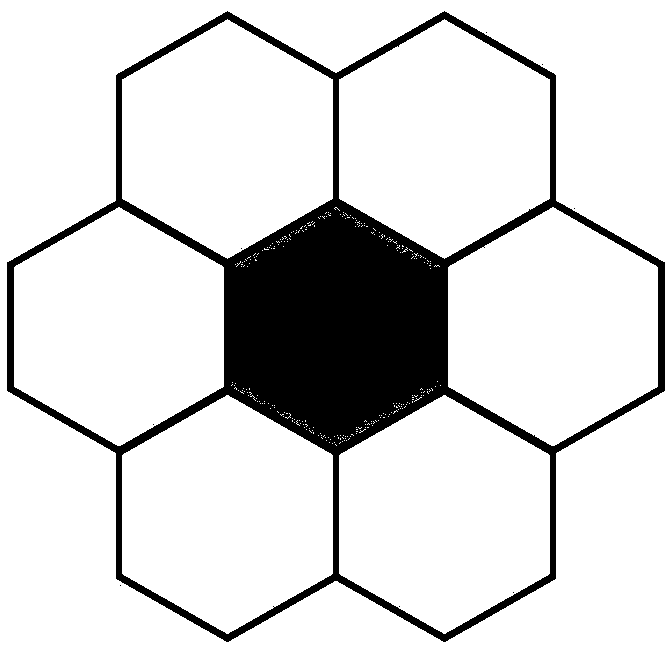
[0041] Step 1. Modeling In this paper, grid modeling is considered for the flight area, and each grid is regarded as a grid area, and the planned route is formed by connecting the center points of the grid. Cutting the map into squares and hexagons (honeycomb type) can realize the gridding of the map and discretize the original continuous map. Considering that the angle of hexagonal routing to adjacent cells is more flexible during the routing process, the present invention adopts a cellular discrete method to carry out cellular gridding on the flight area of the UAV, and aims at the cellular grid for unmanned Classify the drone flight area, set the starting area of the drone flight area, the dangerous area of the drone flight area, the control area of the drone flight area and the crash ...
specific Embodiment approach 2
[0092] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the connection matrix in the step 1 represents:
[0093]
[0094] 0 indicates that the cities are not connected, and 1 indicates that the cities are connected;
[0095] Matrix A limits that ants can only choose to choose the next city in the city adjacent to the current city, for example: line 18 has A(18,3)=1,A(18,6)=1,A(18, 21) = 1, the other columns in row 18 are 0.
[0096] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0097] Embodiment 3: This embodiment differs from Embodiment 1 or Embodiment 2 in that: the value of the pheromone influencing factor α in step 3 is 0≤α≤1.
[0098] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More