Vehicle laser radar data city road shaft identification algorithm based on multi-frame joint
A vehicle-mounted lidar, multi-frame combination technology, applied in scene recognition, character and pattern recognition, calculation and other directions, can solve the problems of large amount of calculation, low recognition rate, missed detection and other problems, achieve small amount of calculation, sufficient feature extraction, The effect of high recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
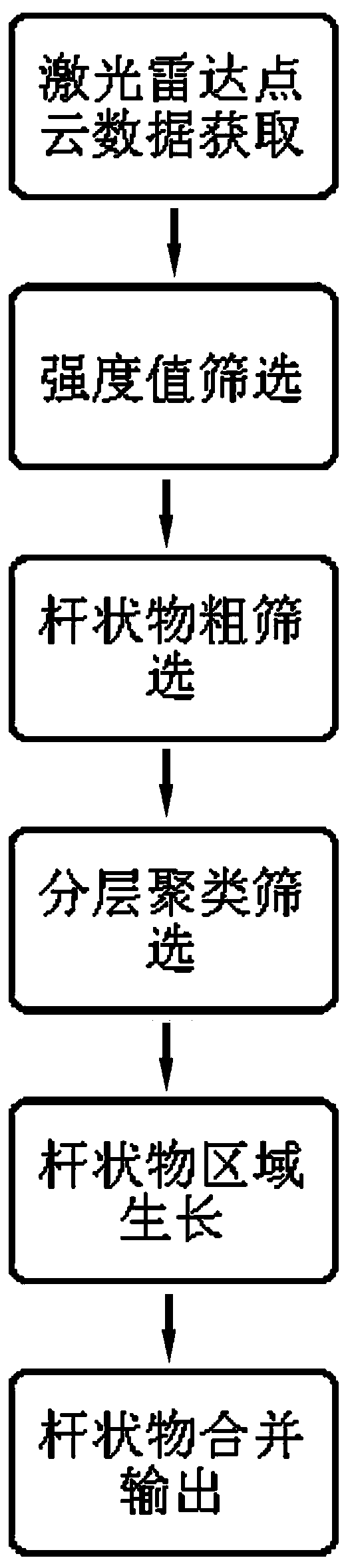
[0027] like figure 1 As shown, the present invention is a kind of urban road rod recognition algorithm based on multi-frame joint vehicle laser radar data, comprising the following steps:
[0028] 1. LiDAR point cloud data acquisition.
[0029] Because the point cloud data of a single frame is relatively sparse, which is not conducive to object recognition, in order to better identify rods, the present invention uses multi-frame joint point cloud data. The multi-frame joint mainly uses the ICP (Iterative Closest Point) algorithm, and its key idea is to find corresponding point pairs to achieve the purpose of point cloud splicing, thereby forming dense point cloud data. Therefore, the amount of point cloud data after splicing is large, and preprocessing and screening are required.
[0030] The pretreatment screening includes three steps: intensity value screening, rod rough screening and hierarchical clustering screening.
[0031] 2. Intensity value screening.
[0032] Afte...
Embodiment 2
[0055] There are a total of 600 frames of experimental data in this experiment, and these experimental data are tested one by one, and the recognition results of all experimental data are collected for statistics.
[0056] For the 600 frames of 32-line radar data measured, 120 frames were extracted every 5 frames for statistics of the experimental results, and the recall rate (Recall) and recognition rate (Precision) were counted.
[0057] Recall = true rods / all rods
[0058] Accuracy (Precision) = Truly a rod / Algorithm detects a rod
[0059] After manually counting 2130 rod-shaped objects, the algorithm detected 2098 rod-shaped objects, of which 1970 were actually rod-shaped objects, so the recall rate was 92.49% and the accuracy rate was 93.90%.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



