

Method and device of detecting whether GNSS terminal is on or below overhead road
A detection method and a detection device technology, which are applied in the field of intelligent transportation, can solve problems such as judgment errors, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0031] In the model learning stage, the observation data of GNSS terminals on the elevated and GNSS terminals under the elevated are collected as a data set, and the "bootstrapping" method is used to generate more than one set of sampling data. Correspondingly, a decision tree is generated, but unlike the general decision tree, in order to add disturbance to the feature selection, the feature candidate set for selecting the optimal feature in the above decision tree splitting metric is not all features, but all features A subset of , and the resulting multiple decision trees form a random forest.
[0032] The data set includes WGS84 longitude, WGS84 latitude, GNSS elevation, azimuth, number of satellites, north speed, east speed, ground speed, north position error standard deviation, east position error standard deviation, ground position error standard Any of several eigenvalues of deviation, standard deviation of northward speed error, standard deviation of eastward speed ...
Embodiment 2
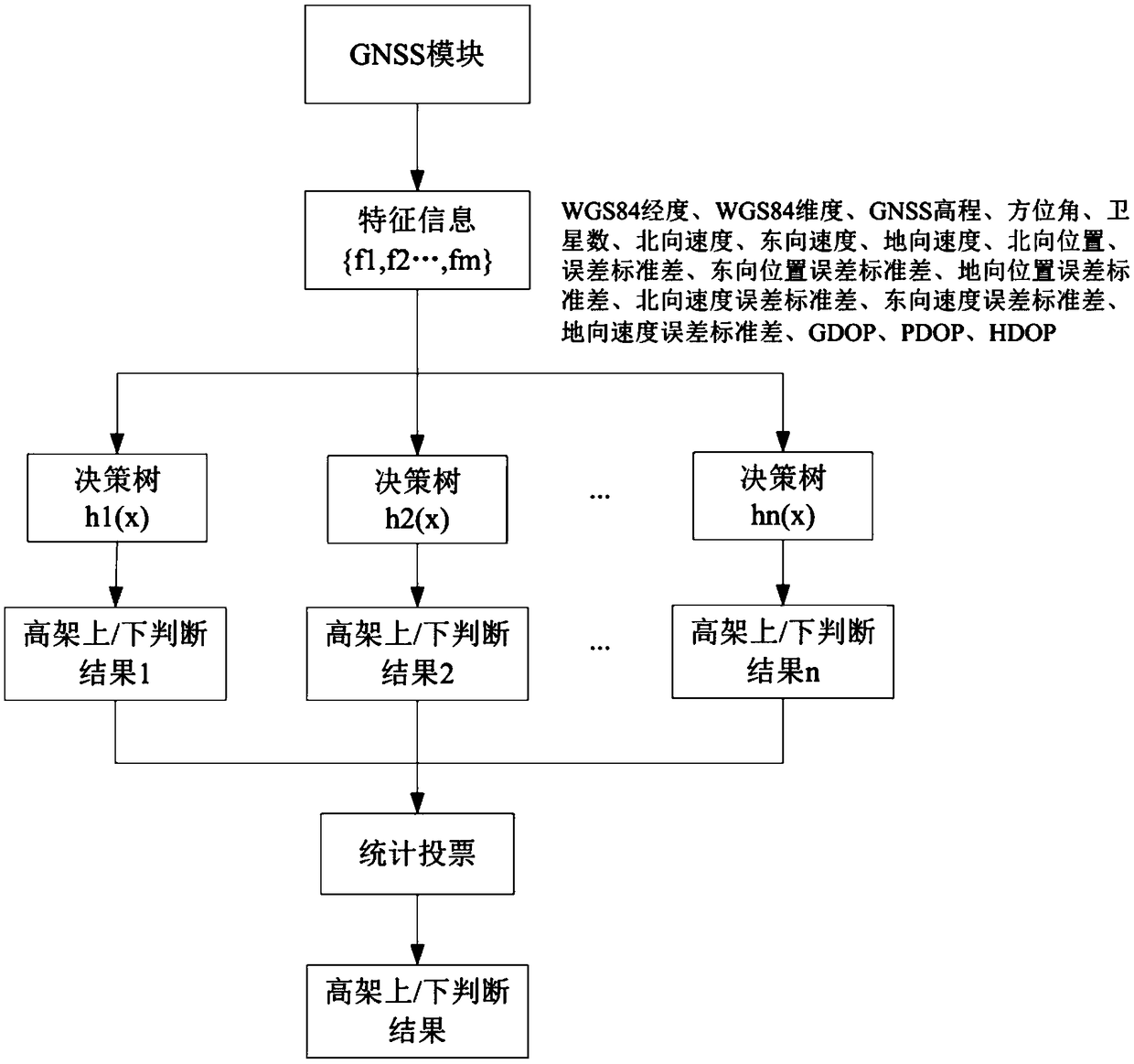
[0034] figure 1 It is a flow chart of the detection method on or under the elevated road based on random forest in the present invention. In the model application stage, the information provided by the GNSS module in the read terminal is used as input features, including WGS84 longitude, WGS84 latitude, GNSS elevation, azimuth, Number of satellites, north speed, east speed, ground speed, north position error standard deviation, east position error standard deviation, ground position error standard deviation, north speed error standard deviation, east speed error standard deviation, ground speed Error standard deviation, GDOP (Geometric Dilution of Precision, geometric precision factor), PDOP (PositionDilution of Precision, three-dimensional positioning ambiguity), HDOP (Horizontal Dilution of Precision, two-dimensional positioning ambiguity), respectively recorded as the feature {f 1 , f 2 ..., fm}, m=17.
[0035] Import the above features into the random forest model system...
Embodiment 3
[0047] The present invention also provides a detection device for a GNSS terminal on or under the elevated, comprising:
[0048] The GNSS module is used to provide observation data and perform feature extraction to obtain the observation feature value of the GNSS terminal;
[0049] A decision-making result generation module, used to input the observed characteristic value into the random forest model, and the random forest model gives more than one decision-making result according to the observed characteristic value;
[0050] Elevated up / down judgment module, based on the classification of the decision results of GNSS terminals on the elevated or GNSS terminals under the elevated, the decision results accounting for more than 50% are used as a random forest model to give the judgment result of the GNSS terminal on the elevated or under the elevated .
[0051] Preferably, the decision result includes the information that the GNSS terminal is on the elevated or the GNSS termin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More