

Underwater narrow space detection orientated flexible robot system
A robot system and robot technology, applied in the field of flexible robots, can solve problems such as large safety hazards and inaccurate detection, and achieve the effect of safe and reliable use, convenient operation, and solving detection problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0036] like Figure 1-5 shown.
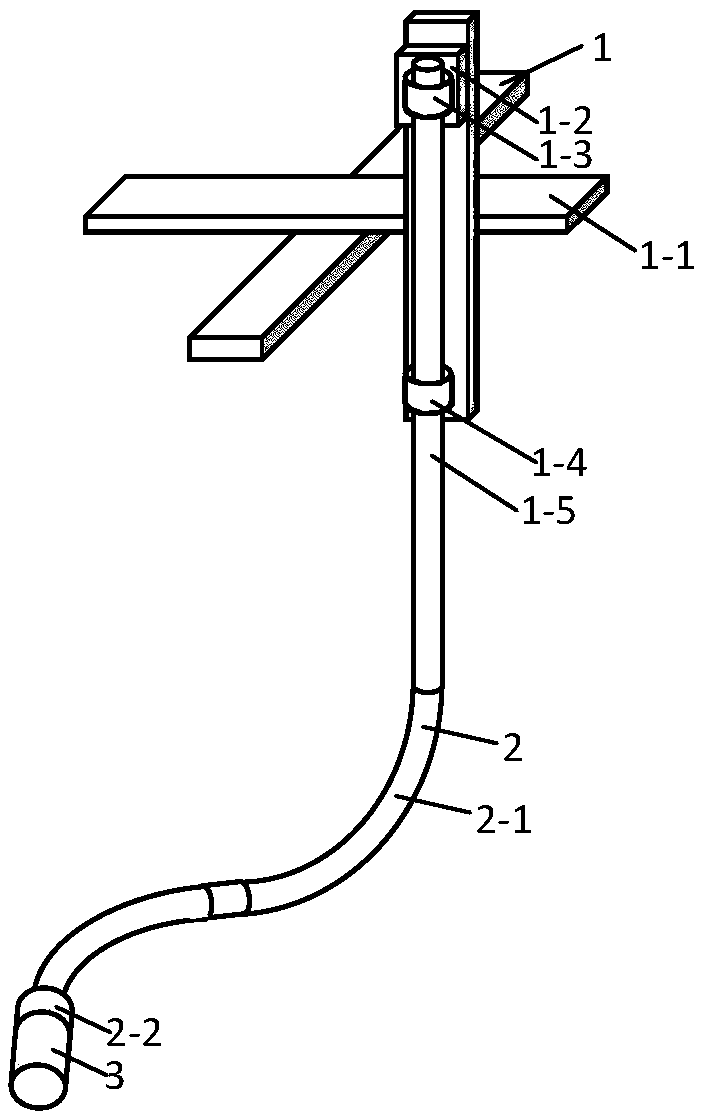
[0037] A flexible robot system for underwater narrow space detection, including a rigid multi-joint robot 1, a flexible robot 2, an underwater camera 3, a control system 4, and the like. like figure 1 shown. Rigid multi-joint robot 1 is installed on the base, and its last joint is a moving joint, including multi-joint robot body 1-1, multi-dimensional force sensor 1-2, upper chuck 1-3, lower chuck 1-4 and Z-direction Rods 1-5. The multi-dimensional force sensor 1-2 is installed on the moving part of the end joint of the multi-joint robot 1, and the upper chuck 1-3 is fixedly connected with the multi-dimensional force sensor 1-2. The lower chuck 1-4 is installed on the fixed part of the end joint of the multi-joint robot 1 . A pose sensor 2 - 2 and an underwater camera 3 for acquiring pose information at th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More