

A joint measurement method based on lidar and binocular visible light camera
A technology of laser radar and measurement method, which is applied in the direction of measurement device, radio wave measurement system, photogrammetry/video measurement, etc., and can solve problems such as cumulative error, error, irregular layout, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
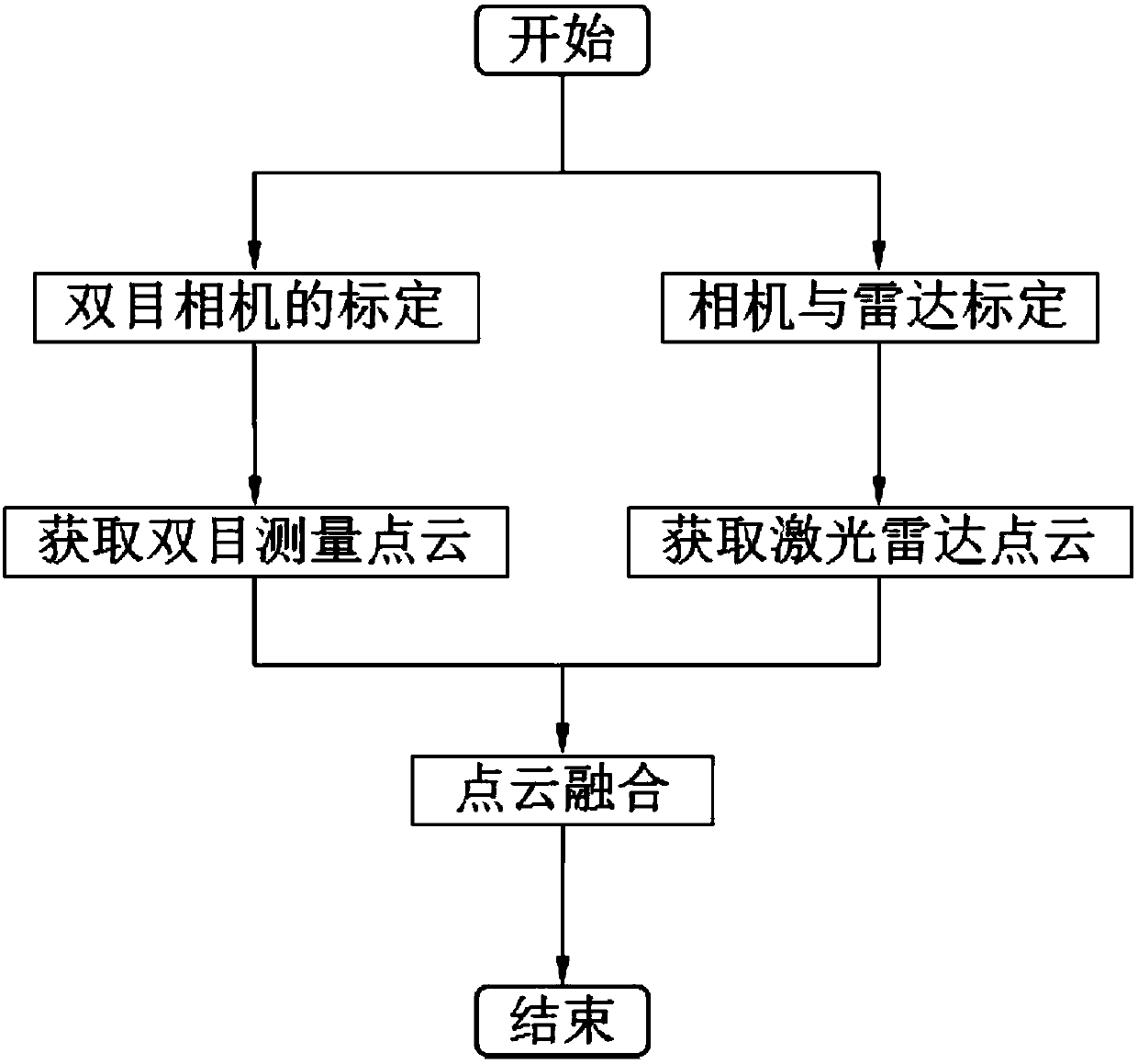
[0091] In the measurement system built in this embodiment, the laser radar is set up in the middle of the binocular camera, the overall coordinate system of the binocular camera measurement system is established on the left camera, the origin is established at the optical center, the u direction of the camera imaging plane is the X direction, v The direction is the Y direction, and the optical axis direction is the Z-axis direction.
[0092] The camera used in the measurement system is Jinghang JHSM300f. The pixel size is 3.2*3.2μm, and the resolution is 2048*1536. Two sets can be placed freely to form a binocular measurement system.
[0093] The lidar uses FARO Focus3D X330 HDR, which is a high-speed 3D scanner with an ultra-long scanning distance. The scanning range is 0.6-330 meters; the measurement error is ±2mm at 10m and 25m; the ref...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More