Obstacle detection and road surface segmentation algorithm based on three-dimensional laser radar
A three-dimensional laser and obstacle detection technology, applied in measurement devices, re-radiation of electromagnetic waves, radio wave measurement systems, etc., can solve the problems of small grid map range, limited running speed, single features, etc., and achieve simple and effective data processing. , improved accuracy, clear segmentation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
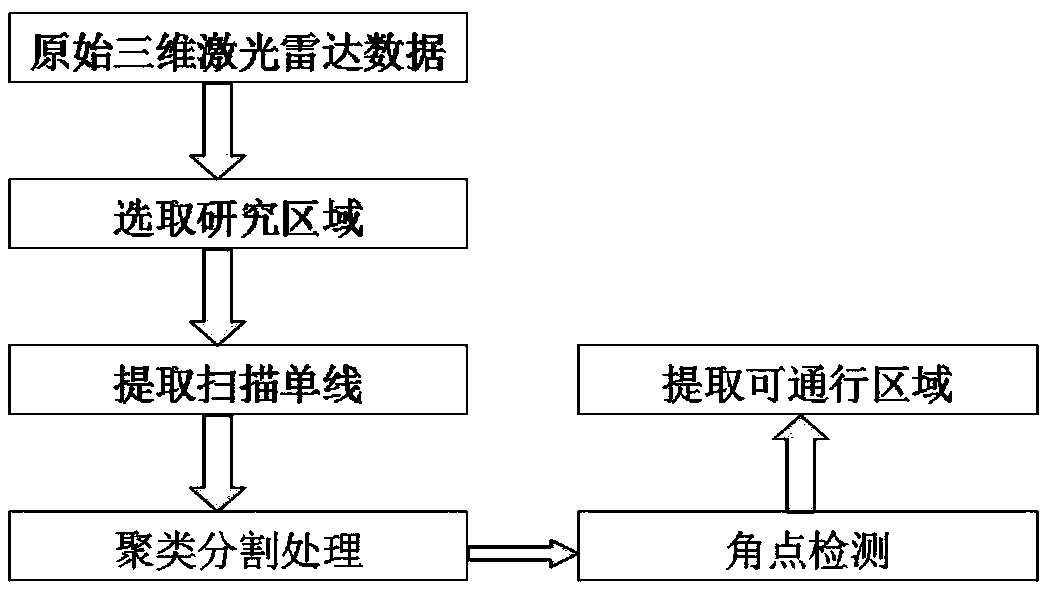
[0060] The obstacle detection and road surface segmentation algorithm based on three-dimensional laser radar of the present invention comprises the following steps:
[0061] Step 1: The 3D lidar scans the surrounding environment, obtains the point cloud data of the surrounding environment, and converts the point cloud data from the lidar coordinate system to the local Cartesian coordinate system after correction;
[0062] Step 2: Extracting three-dimensional lidar interest data points from the point cloud data, the interest data points refer to the point cloud data in front of the vehicle, specific...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More