

Routing inspection scene based unmanned aerial vehicle patrol path planning method
A path planning and machine patrol technology, applied in the direction of genetic models, genetic rules, navigation calculation tools, etc., can solve the problem of short flight distance, achieve the effect of reducing workload and difficulty, and reducing the amount of collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings. The accompanying drawings are only for illustrative purposes and should not be construed as limitations on this patent.
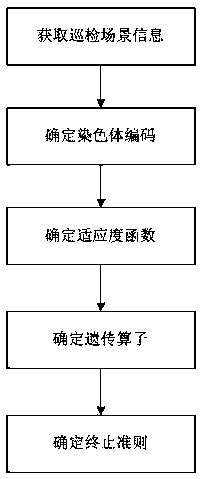
[0031] Such as figure 1 As shown, a method for planning a machine patrol path based on a patrol inspection scene includes the following steps:
[0032] S1: Obtain inspection scene information: obtain real-time inspection scene information including inspection line information and inspection weather information. The inspection line information includes line grade, pole tower, and wire model split number; inspection weather information includes coordinate information, altitude Altitude, air temperature, wind speed, wind direction, atmospheric pressure. Among them, the inspection line information is connected to the data by the production system, and the inspection meteorological information is connected to the data by the meteorological information int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More