

Fault detection method and system
A fault detection and detection technology, applied in the direction of measuring devices, optical testing flaws/defects, instruments, etc., can solve the problems of low efficiency and poor accuracy of appearance detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
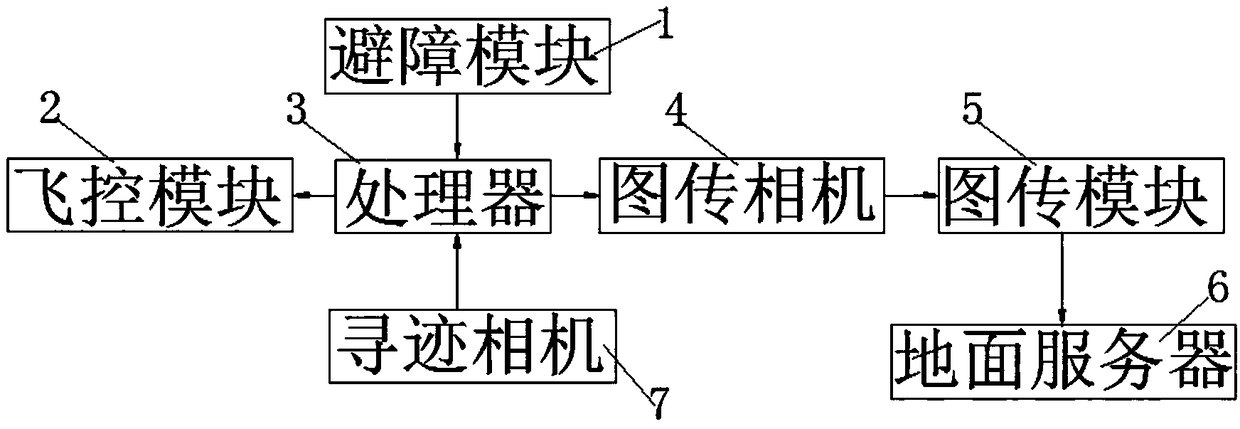
[0109] The fault detection system of the present invention includes an unmanned aerial vehicle and a ground server 6 connected to it in communication; The tracking camera 7; the obstacle avoidance module 1, the flight control module 2, the image transmission camera 4, and the tracking camera 7 are all connected in communication with the processor 3; the image transmission camera 4 and the ground server 6 are all connected to each other The image transmission module 5 is connected in communication; the obstacle avoidance module 1 is used to provide the distance information from the UAV to the obstacle; the image transmission camera 4 is used to scan the detected object according to the preset scanning direction and Taking pictures; the image transmission module 5 is used to send the collected image information to the ground server 6; the flight control module 2 is used to run the tracking algorithm, so that the UAV can fly according to the preset path; The ground server 6 is us...
Embodiment 2
[0117] Further, on the basis of embodiment 1:
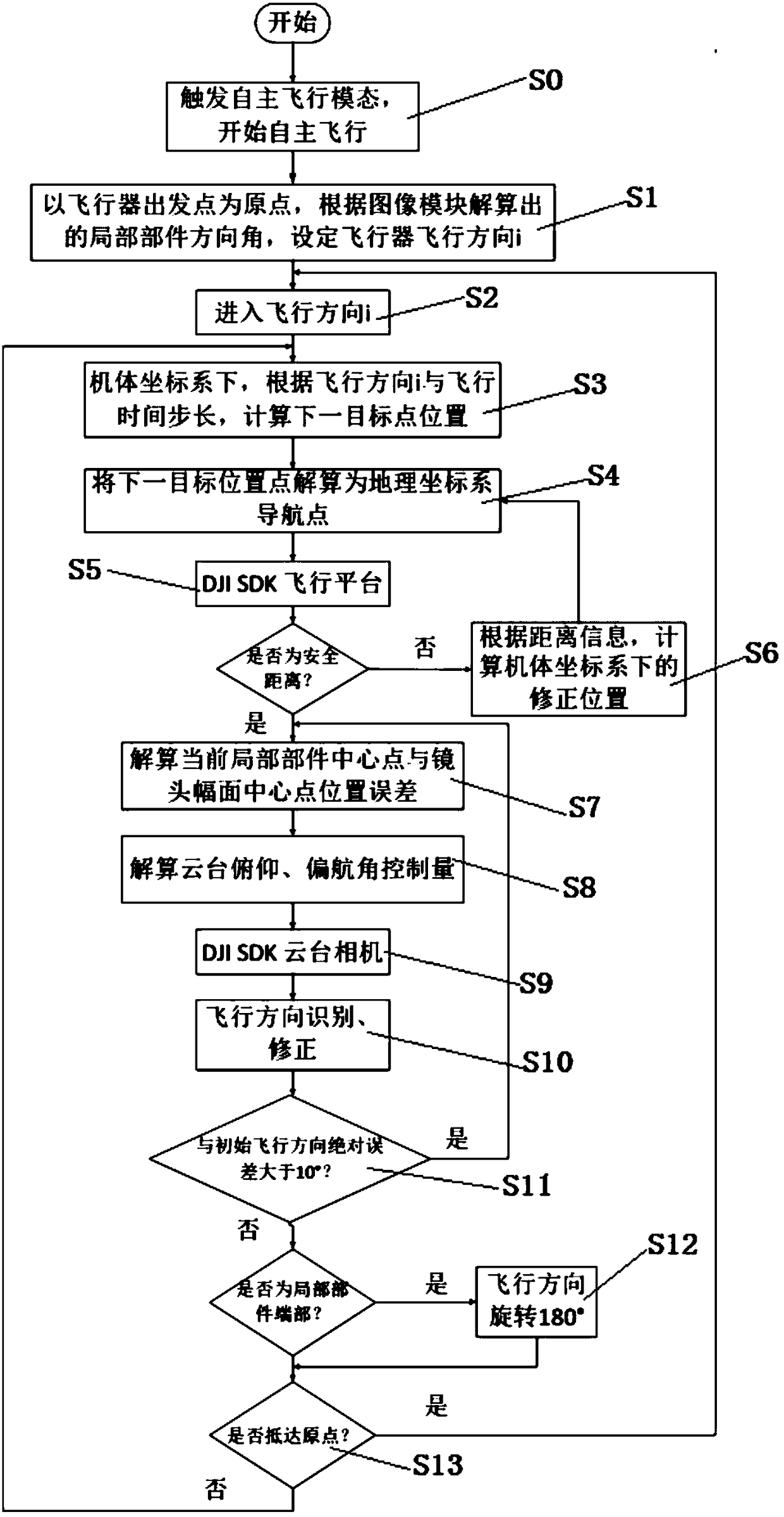
[0118] The fault detection method of the present embodiment 2 is used for the fault detection system, comprising steps:
[0119] The unmanned aerial vehicle flies to the front of the detected object to ensure that the tracking camera 7 can photograph the complete detected object;
[0120] When the unmanned aerial vehicle first traces, the processor 3 runs a full contour extraction algorithm to complete the extraction of the entire contour of the detected object, and outputs the azimuth of each local part of the detected object and the imaging plane;
[0121] According to the obstacle distance information provided by the obstacle avoidance module 1 and the azimuth angle of the imaging plane provided by the tracking camera 7, the scanning direction is determined, and the image transmission camera 4 scans the local parts of the detected object according to the scanning direction. to scan;
[0122] The processor 3 runs a local cont...
Embodiment 3
[0127] Further, on the basis of embodiment 2:
[0128] When the unmanned aerial vehicle first traces, the processor 3 runs a full contour extraction algorithm to complete the extraction of the entire contour of the detected object, and outputs the azimuths of each local part of the detected object and the imaging plane including:
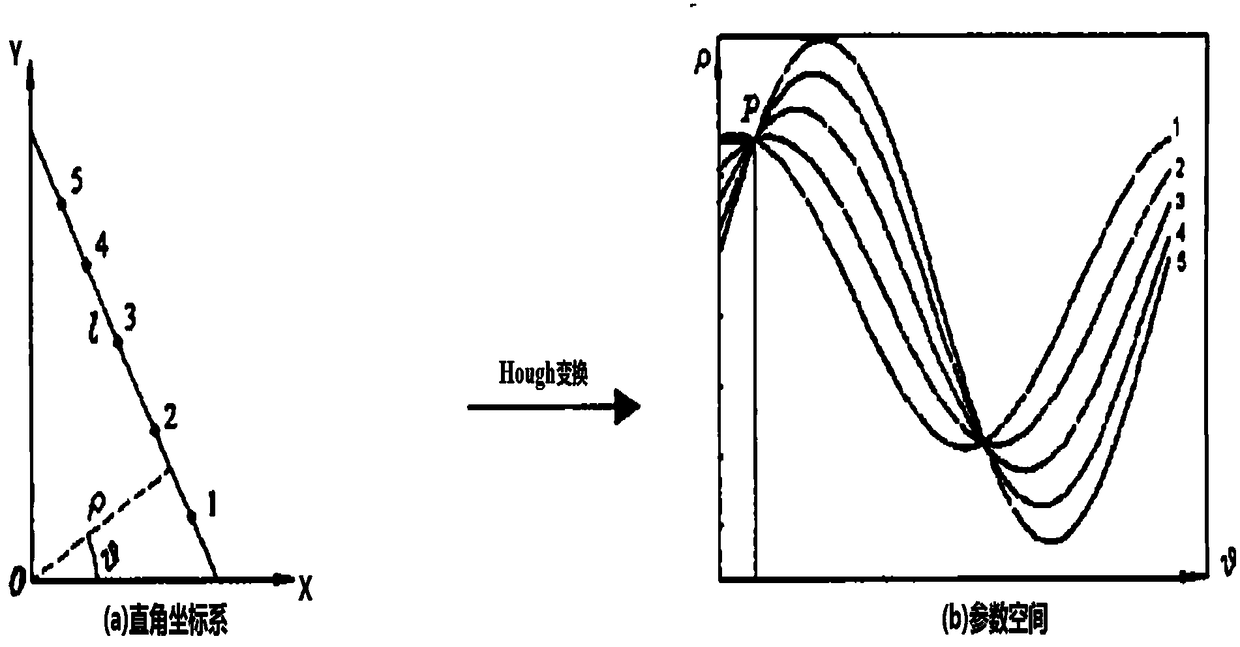
[0129] The full contour detection of the detected object is realized by combining the Canny edge detection operator with the Hough transform;
[0130] The azimuth angle between each local component and the imaging plane is calculated by Hough transform.
[0131] The Canny edge detection operator smoothes the image through a Gaussian filter, and implements non-extreme value suppression to obtain the edge of the image;
[0132] The Canny edge detection operator is an operator that integrates image smoothing, edge enhancement and detection. The basic principle of this operator is to select a Gaussian filter to smooth the image to be processed; and pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More