

Civil aircraft man-in-the-loop system, active sidestick servo tracking control system and method
A technology of active side stick and tracking control, applied in the field of pilot control platform, can solve the problems of non-linkage on both sides, no explanation or report found, lack of autopilot reverse drive, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
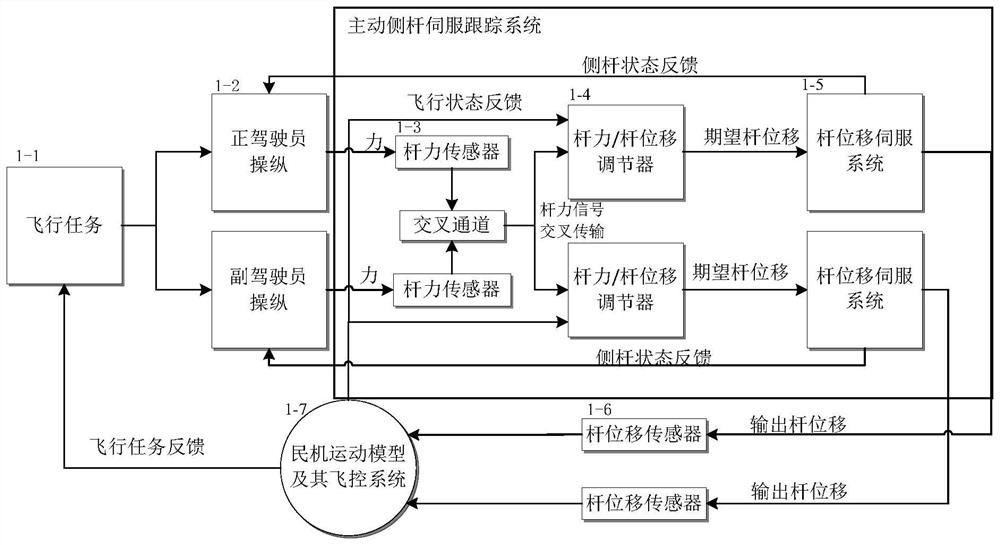
[0062] This embodiment provides a civil aircraft man-in-the-loop system, including: an active sidestick servo tracking control system, a flight mission module, a pilot and co-pilot control model, a civil aircraft motion model and its flight control system; wherein:
[0063] The rod displacement sensor of the active side rod servo tracking control system of the civil aircraft measures the displacement of the active side rod and transmits it to the civil aircraft motion model and its flight control system;
[0064] The flight task input module part generates corresponding flight instructions according to the current flight requirements, and outputs the flight instructions to the pilot and co-pilot manipulation models;
[0065] The control model of the pilot and co-pilot forms the stick force movement relationship between the neuromuscular and the active side stick when the pilot is manipulating according to the flight instructions, and obtains the current driver's output force; ...
Embodiment 2
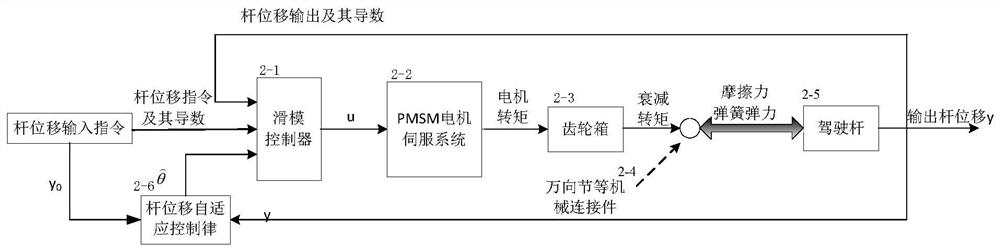
[0071] This embodiment provides an active sidestick servo tracking control system, including: a lever force sensor and a cross-channel transmission component, a lever force and lever displacement regulator, an active sidestick lever displacement servo system, and a lever displacement sensor; wherein:
[0072] The rod force sensor and the cross channel transmission part collect the current output force of the driver and transmit it to the corresponding rod force and rod displacement regulator;
[0073] The rod force and rod displacement regulator forms the driver's desired rod displacement according to the current driver's output force, and outputs the rod displacement input command to the active side rod rod displacement servo system;
[0074] The active side rod displacement servo system outputs the rod displacement of the active side rod to the rod displacement sensor according to the rod displacement input command;
[0075] The lever force and lever displacement regulator s...
example
[0185] A simulation example is given below. The selection of sidestick and motor must take into account the space occupancy rate of the cockpit and the pilot's control characteristics. The motor actuator should not be too large and can meet the needs of servo actuation. The travel range of the grip satisfies the pilot's control comfort. Therefore, the physical parameters of the experimental simulation of the active sidestick servo control system are selected as shown in Table 1 and Table 2:
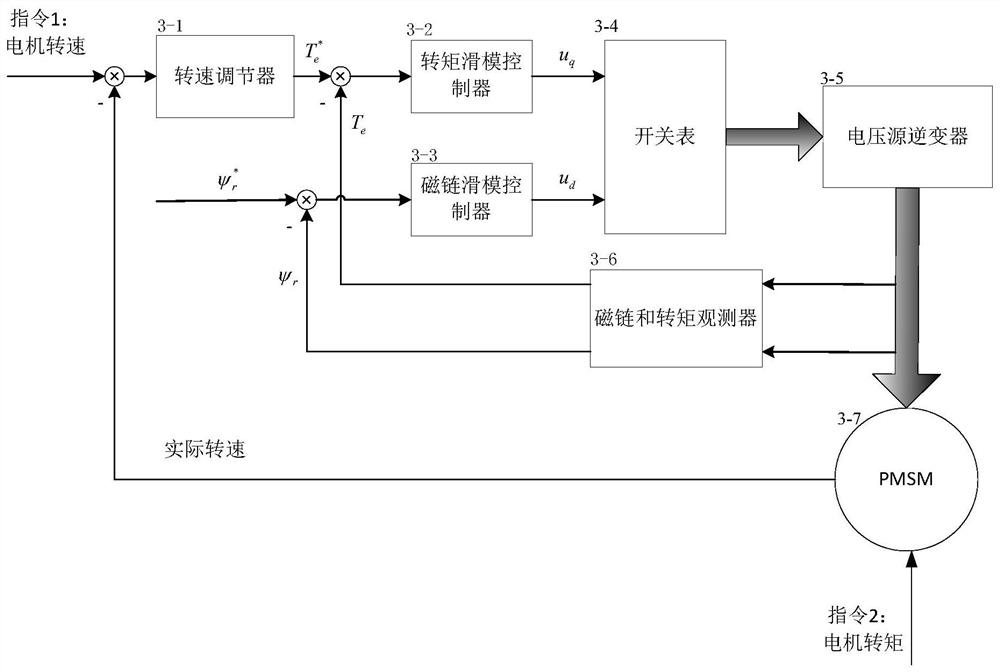
[0186] Table 1. PMSM physical parameters:
[0187] Phase 3 Stator phase resistance 5.6Ω Armature inductance 8.5mH Magnetic link 0.023V·s Moment of inertia 0.41×10 -4 kg·m 2
Number of pole pairs 12 voltage 60V
[0188] Table 2. Physical parameters of the active sidestick:
[0189] Moment of inertia 6.67×10 -2 kg·m 2
Gearbox reduction ratio 1 / 180 coefficient of friction 0.15 spring arm 0.05m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More