

Novel five-degree-of-freedom hybrid mechanism with reconfigurable adjustment device
A technology of adjustment device and hybrid mechanism, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of small working space, large working space, and accumulated error of end-operators of parallel mechanisms, and achieves broad engineering application prospects, Effects of high stiffness properties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
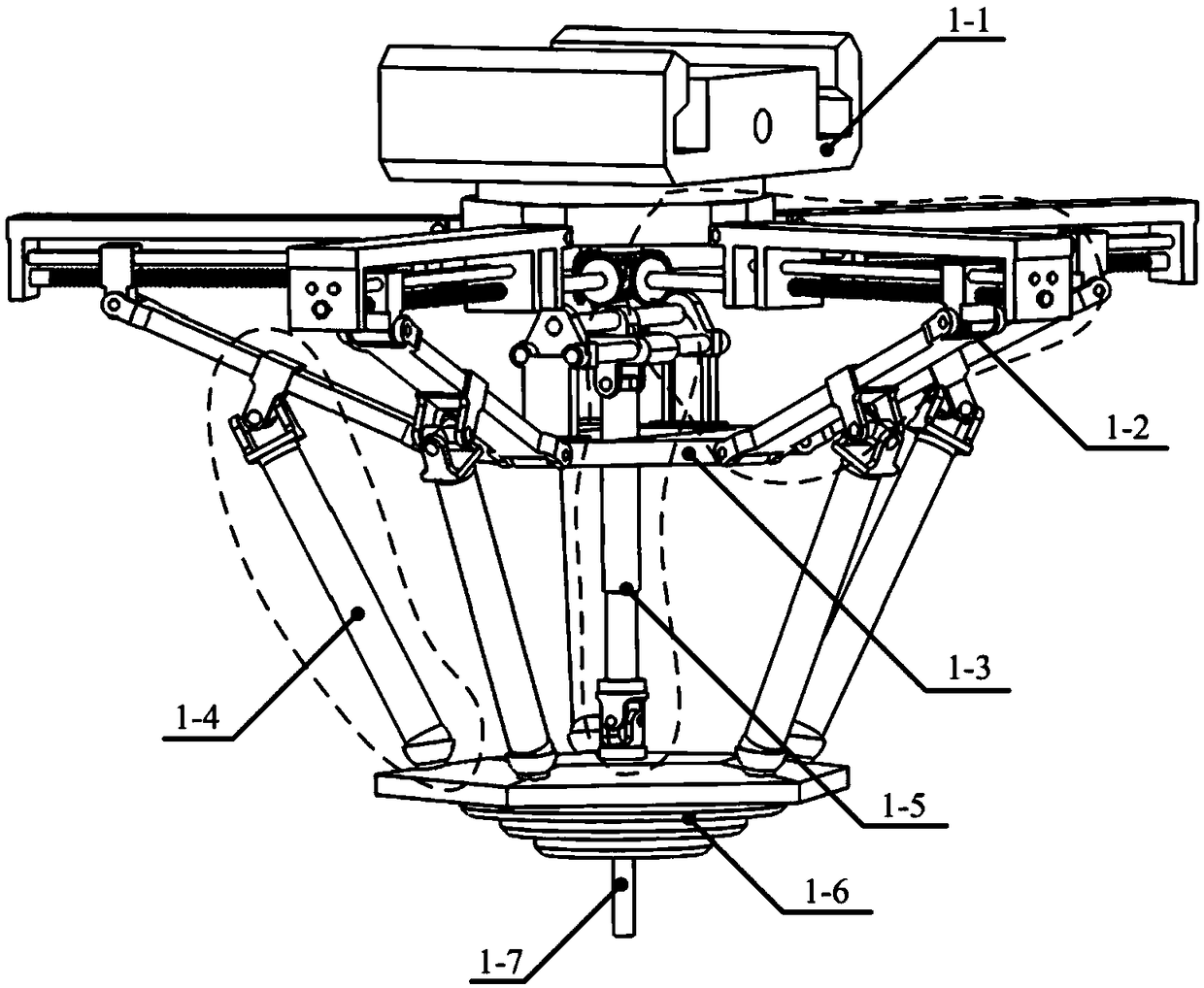
[0068] A new five-degree-of-freedom hybrid mechanism with a reconfigurable adjustment device, such as figure 1 Shown:
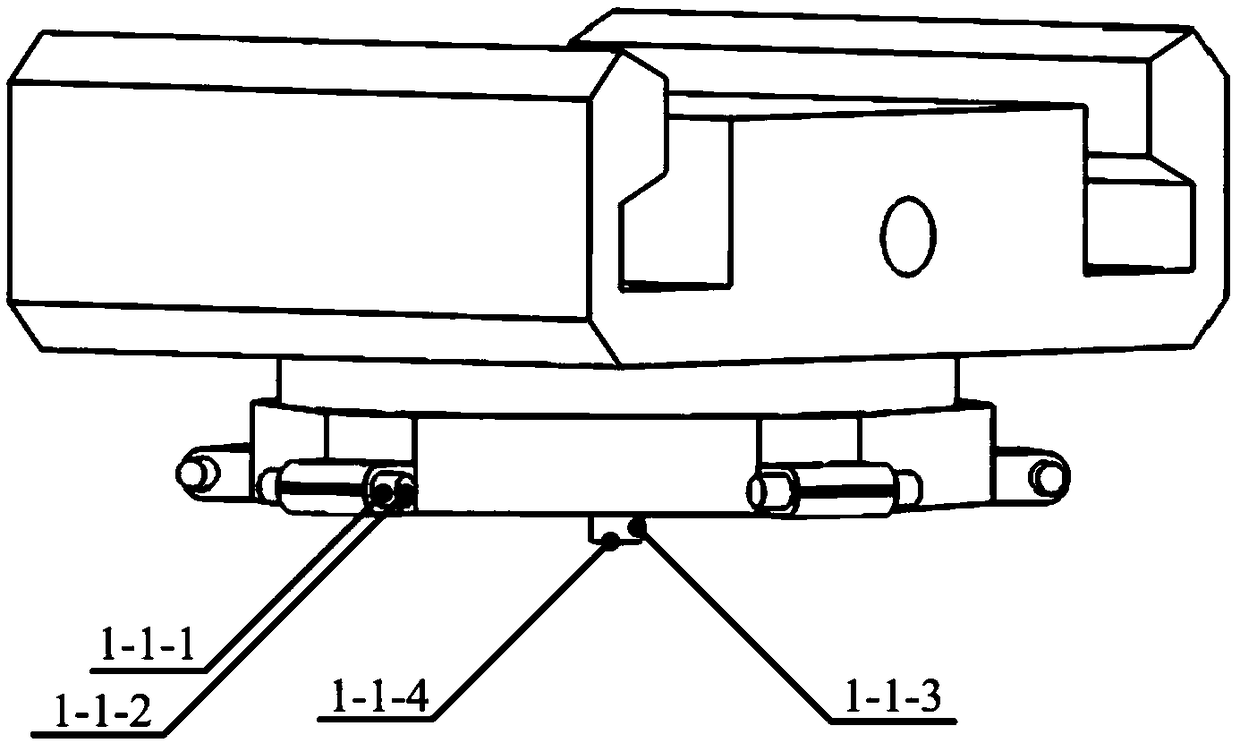
[0069] A novel five-degree-of-freedom hybrid mechanism with a reconfigurable adjustment device, including a fixed platform 1-1 of the reconfigurable adjustment device (such as figure 2 shown), the PRR active motion branch chain 1-2 of the reconfigurable adjustment device, the intermediate platform 1-3 of the reconfigurable adjustment device, the PUS active motion branch chain 1-4, the middle PRPU passive motion branch chain 1-5, Moving platform 1-6 and processing head 1-7.
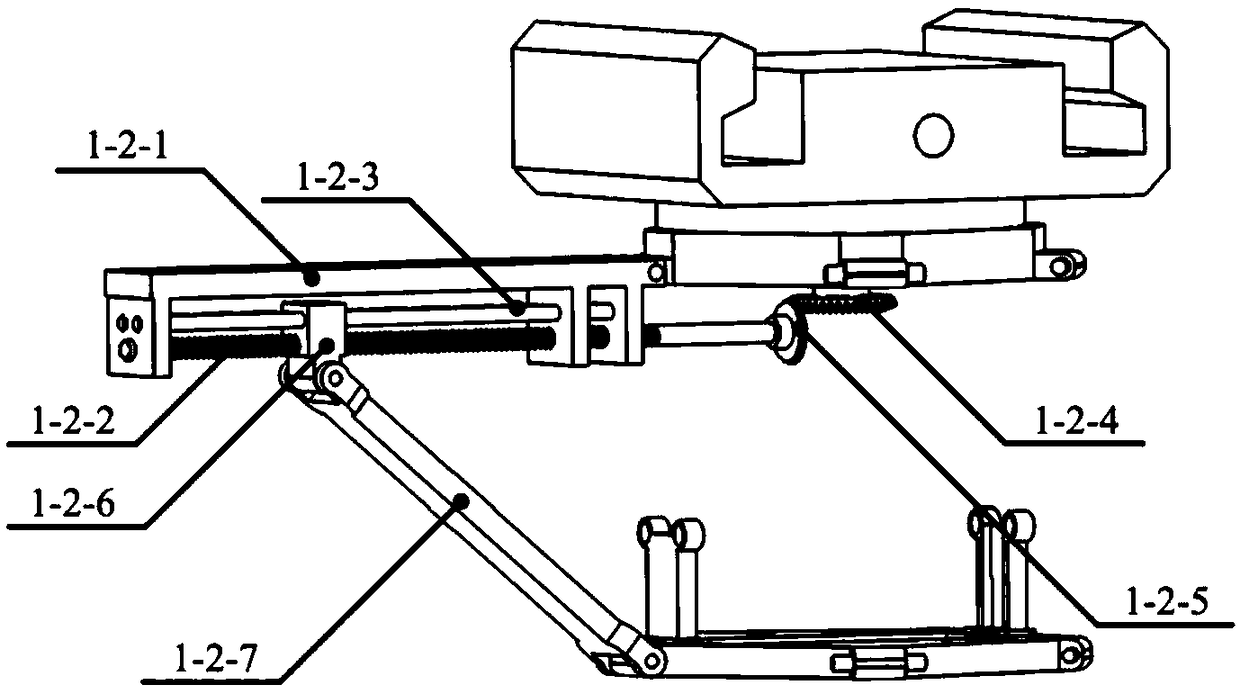
[0070] Such as Figure 3-Figure 11 As shown, they are PRR active motion branch chain 1-2, horizontal support guide rail 1-2-1, lead screw 1-2-2, guide rod 1-2-3, central bevel gear 1-2-4, small cone Structural schematic diagram of gear 1-2-5, R auxil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More