

A Graph-Based Raster Map Segmentation Method
A grid map and map technology, applied in the field of computer vision, can solve problems such as inconsistent segmentation results and corridor inconsistencies, and achieve the effect of accelerating re-estimation and research promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to facilitate those skilled in the art to understand the technical content of the present invention, the content of the present invention will be further explained below in conjunction with the accompanying drawings.
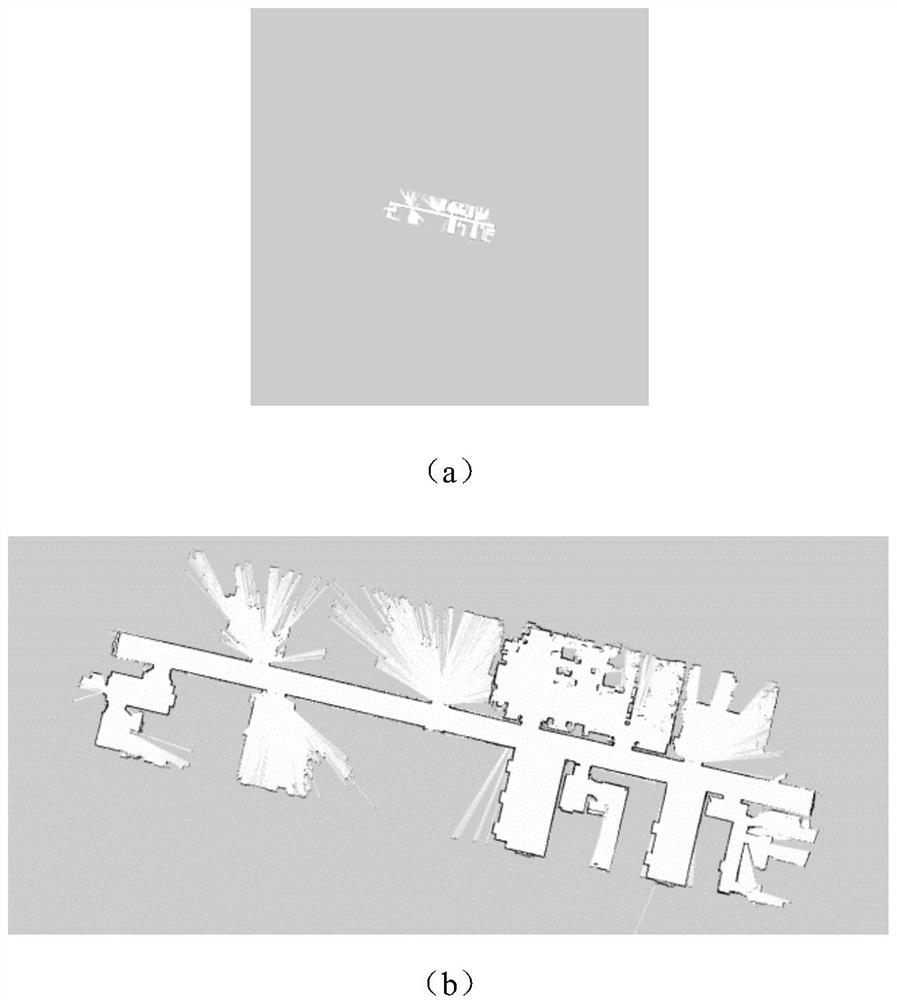
[0065] The grid map used in the embodiment of the present invention is constructed by the HUSKY A200 robot through the Gmapping algorithm in a real office environment, with a resolution of 0.05m and a free area of about 505m 2 . The robot is equipped with ROS system industrial computer, motion control module, information acquisition module, etc., and is also equipped with LMS151 two-dimensional laser radar, odometer, inertial measurement unit and other sensors. Such as image 3 As shown, in a real office environment, there are a large number of obstacles that make the map contour not have a regular geometric shape. The present invention has carried out many experiments, and verified that the graph-based grid map segmentation algorithm propose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More