

Controlling method and device for formation of unmanned aerial vehicles, and controller
A technology for unmanned aerial vehicles and aerial vehicles, which is applied in non-electric variable control, control/regulation systems, three-dimensional position/course control, etc., and can solve the problem of formation consistency of unmanned aerial vehicles, difficult to maintain position and attitude Issues such as unification and affecting the performance of unmanned aerial vehicle formation flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
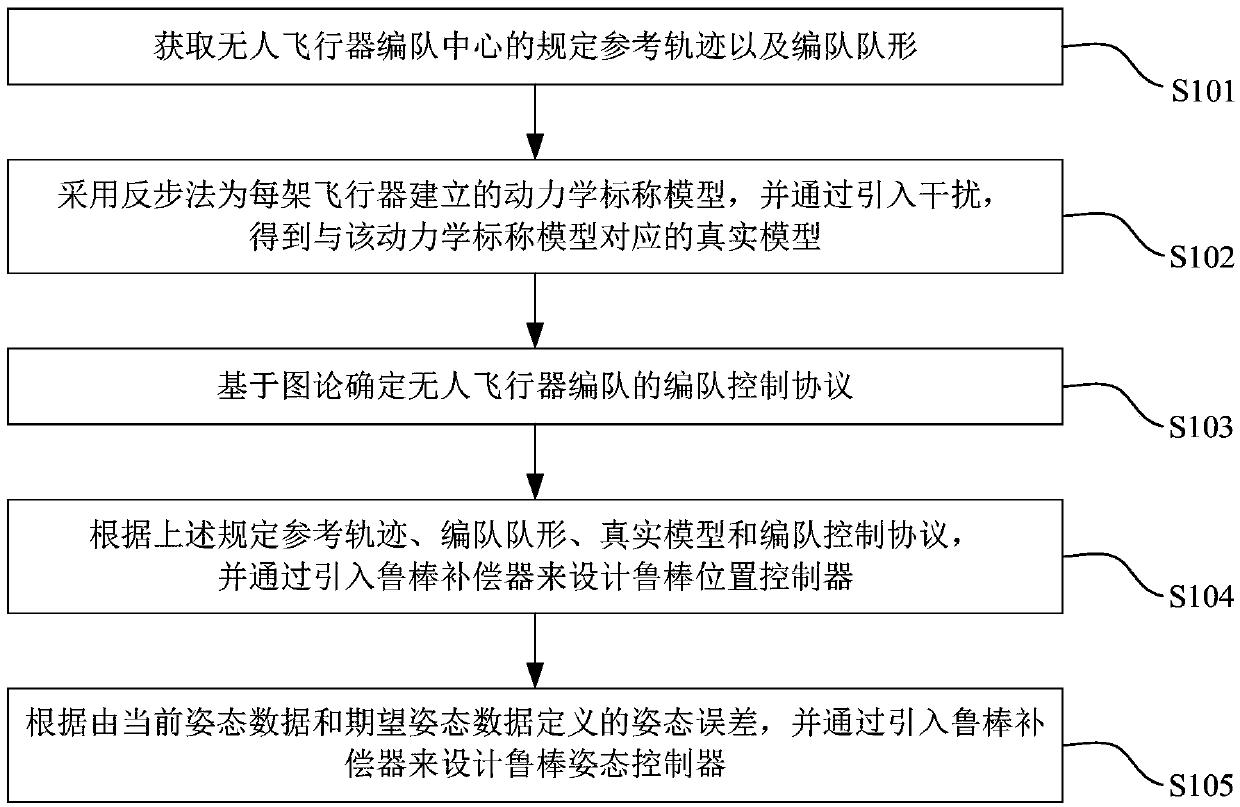
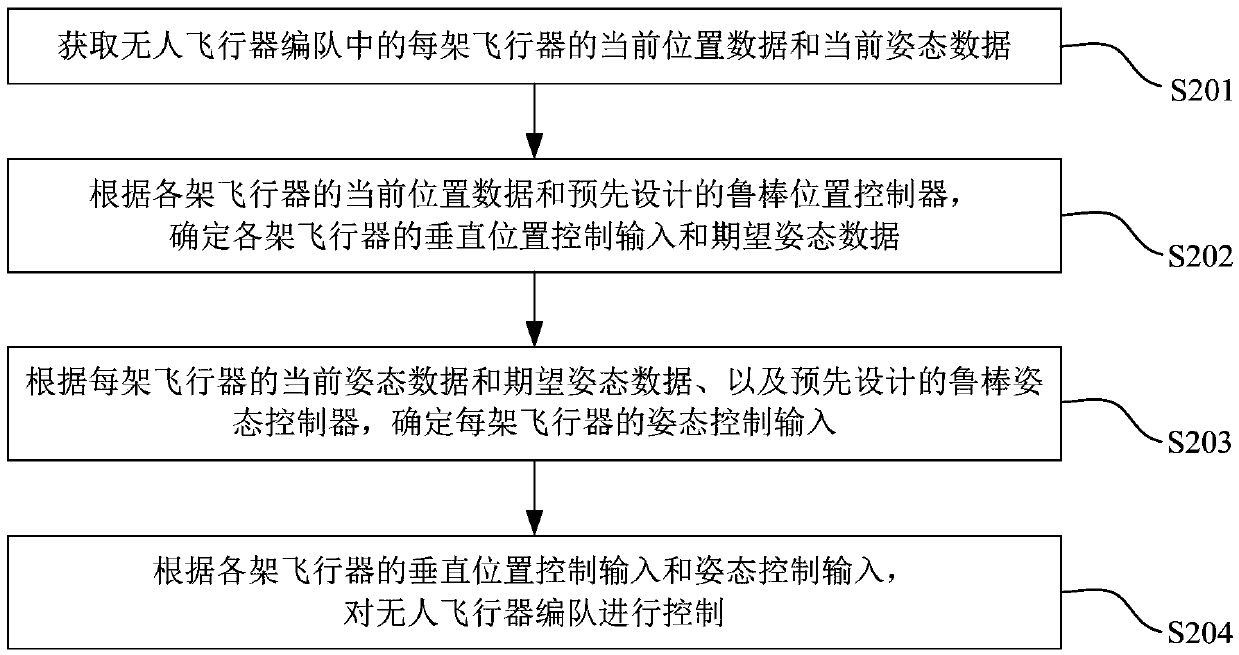
[0029] The embodiment of the present invention provides a method for controlling the formation of unmanned aerial vehicles, which uses a robust control method based on consistency to solve the formation control problem of a group of unmanned aerial vehicles, and is suitable for various unmanned aerial vehicles, especially multi-rotor aircraft . The method is performed by a controller; this controller, also called an ensemble controller, consists of a robust position controller and an attitude controller. A robust position controller is used to control the translational motion to achieve the desired trajectory and formation; an attitude controller is used to stabilize the attitude of the aircraft. First refer to the following figure 1 Explain the establishment process of robust position controller and robust attitude controller, and then based on figure 1 The established robust position controller and robust attitude controller, refer to figure 2 The method for controlling ...
Embodiment 2
[0155] Figure 9 A schematic structural diagram of a control device for an unmanned aerial vehicle formation provided by an embodiment of the present invention, as shown in Figure 9 As shown, the device includes: a data acquisition module 91, which is used to obtain the current position data and current attitude data of each aircraft in the unmanned aerial vehicle formation; The pre-designed robust position controller determines the vertical position control input and expected attitude data of each aircraft; the attitude control determination module 93 is used to determine the current attitude data and expected attitude data of each aircraft and the pre-designed robust The attitude controller determines the attitude control input of each aircraft; the flight control module 94 is used to control the unmanned aircraft formation according to the vertical position control input and attitude control input of each aircraft; wherein, the robust position controller and Robust attitu...
Embodiment 3
[0158] see Figure 10 , the embodiment of the present invention also provides a controller 100, including: a processor 40, a memory 41, a bus 42 and a communication interface 43, the processor 40, the communication interface 43 and the memory 41 are connected through the bus 42; the processor 40 uses Executable modules, such as computer programs, stored in the execution memory 41 .
[0159] Wherein, the memory 41 may include a high-speed random access memory (RAM, RandomAccessMemory), and may also include a non-volatile memory (non-volatile memory), such as at least one disk memory. The communication connection between the system network element and at least one other network element is realized through at least one communication interface 43 (which may be wired or wireless), and the Internet, wide area network, local network, metropolitan area network, etc. can be used.
[0160] The bus 42 can be an ISA bus, a PCI bus or an EISA bus, etc. The bus can be divided into address...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More