

Robot inspection tour map design method
A design method and robot technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of no integrated map design, high cost of field deployment, and high manpower consumption, so as to reduce manpower Efficient consumption, walking path, and cost-saving effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
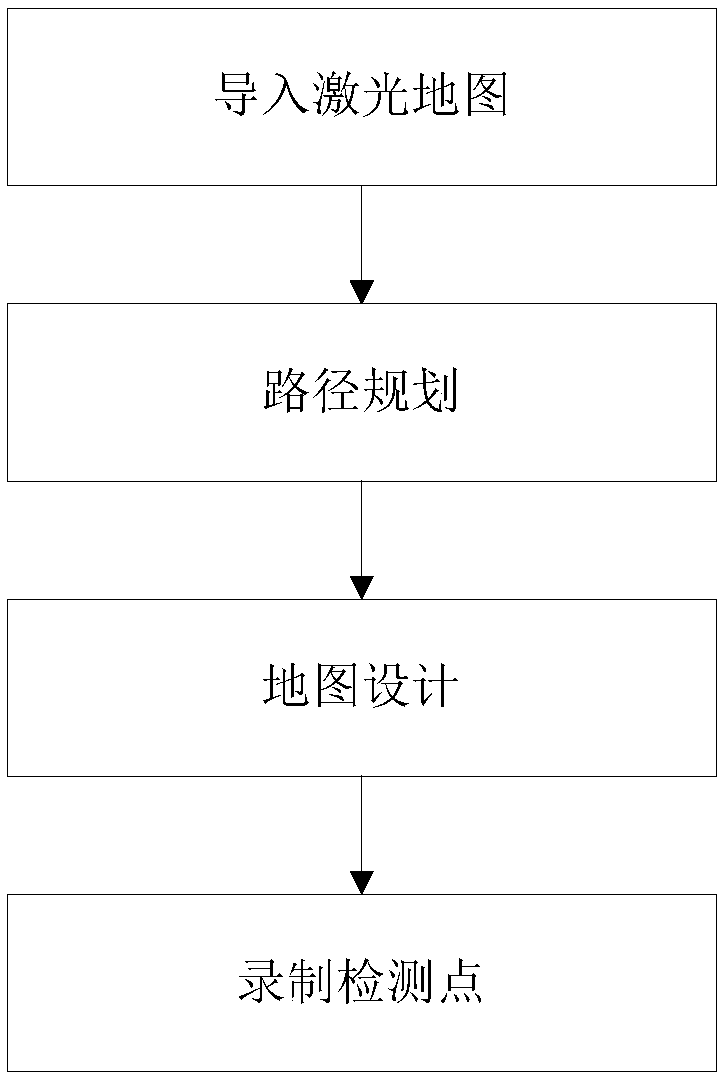
[0018] Such as figure 1 As shown, it is a schematic flow chart of the robot inspection map design method of the present invention. A method for designing a robot inspection map. On the basis of the laser map scanned by the robot, the post-stage rapid design and editing include the following steps:
[0019] A. Import the laser map and obtain the laser map data;
[0020] B. Construct a map coordinate system in the laser map in step A, mark the origin and auxiliary points, and connect the origin and auxiliary points to form a planned path;
[0021] C. Construct the object model, and overlap the obj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More