

An Optimal Distributed State Estimation Method Based on Sensor Networks
A sensor network and state estimation technology, applied in design optimization/simulation, complex mathematical operations, geometric CAD, etc., can solve problems such as non-linear interference sensor network state estimation that cannot be processed at the same time, and achieve the effect of easy solution and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
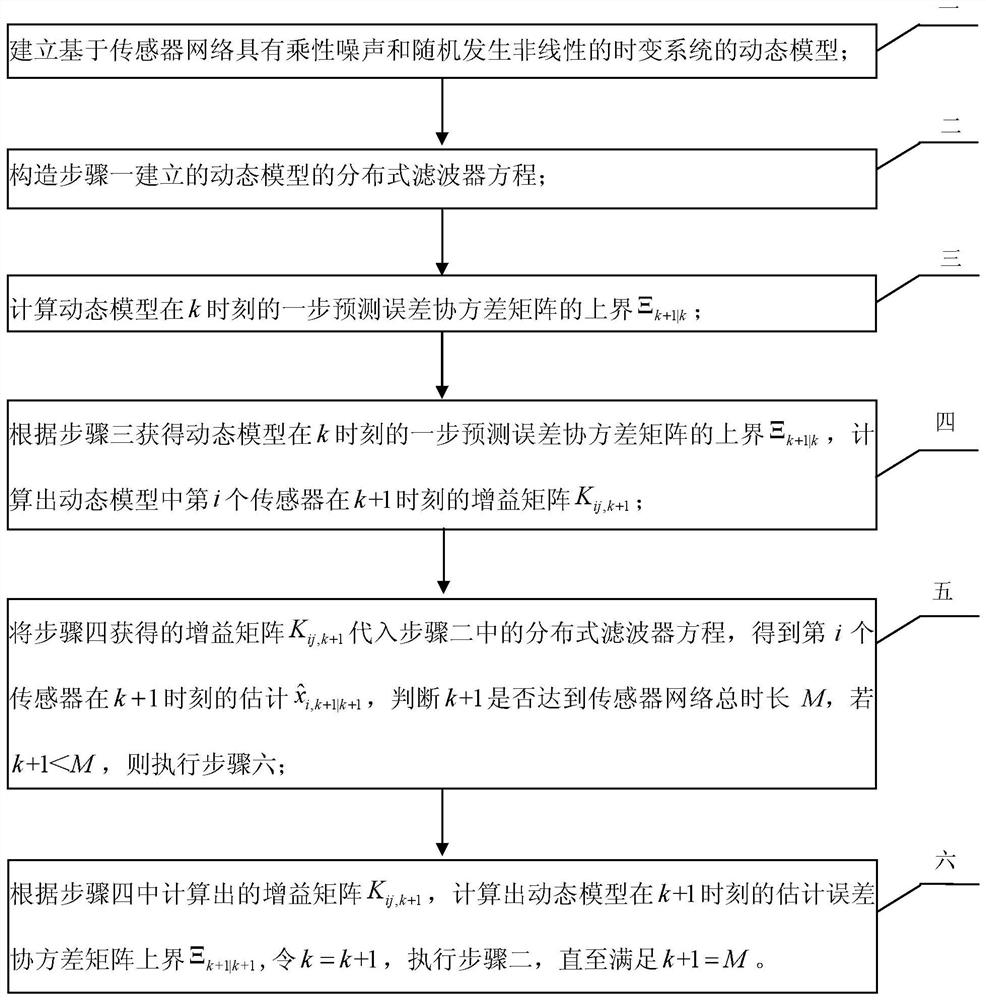
[0023] Specific implementation mode one: combine figure 1 This embodiment will be described. A sensor network-based optimized distributed state estimation method described in this embodiment, the specific steps of the method are:
[0024] Step 1. Establishing a sensor network-based dynamic model of a time-varying system with multiplicative noise and randomly occurring nonlinear disturbances;
[0025] Step 2, constructing the distributed filter equation of the dynamic model established in step 1, and utilizing the distributed filter equation to estimate the state of the dynamic model of the time-varying system;
[0026] Step 3, calculate the upper bound Ξ of the one-step prediction error covariance matrix of the dynamic model at time k k+1|k ;
[0027] Step 4, the one-step prediction error covariance matrix upper bound Ξ of the dynamic model that obtains according to step 3 at time k k+1|k , calculate the gain matrix K of the i-th sensor in the dynamic model at time k+1 ij...
specific Embodiment approach 2
[0032] Specific implementation mode two: this implementation mode further defines a sensor network-based optimized distributed state estimation method described in implementation mode one, and the specific process of step one is:
[0033] A dynamic model of a sensor network-based time-varying system with multiplicative noise and stochastic nonlinearity is established, and the state space form of the dynamic model is:
[0034]
[0035]
[0036] in, is the state vector of the dynamic model at time k, is the state vector of the dynamic model at time k+1, is the real field of the state of the dynamic model, n is the dimension;, y i,k is the measurement output of the i-th sensor of the dynamic model at time k, i=1,2,...,n, N is the number of sensors of the dynamic model; A k is the system matrix, α k is the multiplicative noise of the dynamic model, is the system disturbance matrix; β i,k is the multiplicative noise of the i-th sensor at time k, C i,k is the measur...
specific Embodiment approach 3
[0044]Specific embodiment three: this embodiment further defines a sensor network-based optimized distributed state estimation method described in embodiment two, and the specific process of step two in this embodiment is:
[0045] Construct the distributed filter equation as follows:
[0046]
[0047]
[0048] in, is the state estimate of the i-th sensor at time k, is the estimate of the i-th sensor at time k+1, is the one-step prediction of the i-th sensor at time k, is the independent variable The nonlinear function of K ij,k+1 is the gain matrix of the i-th sensor of the dynamic model at time k+1, Represents the set of all sensors coupled with the i-th sensor; when j is in When inside, h ij = 1, otherwise h ij = 0, h ij Represents the connection relationship between the i-th sensor and the j-th sensor; y j,k+1 is the measurement output of sensor j at time k+1; is the one-step prediction of sensor j at time k; C j,k+1 is the measurement matrix of s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More