

Integral separated PID control method
A technology of integral separation and control method, applied in the field of automatic control, can solve problems such as excessive size, and achieve the effects of good measurement noise, avoid noise amplification, and measurement noise suppression
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
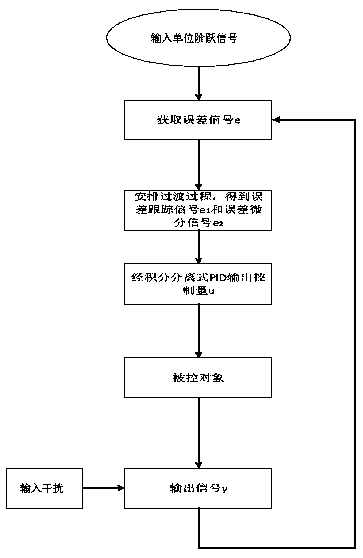
[0048] Such as figure 1 with figure 2 As shown, an integral-separation PID control method, the controlled object is assumed to be a second-order object, and its transfer function form is:
[0049]
[0050] where K is the system gain, T 1 and T 2 is the system time constant;
[0051] Its control method comprises the following steps;
[0052] S1: Design feedback loop filter TD2, input and output signal y(t), output filter signal y 0 (t);
[0053] S2: Design the tracking differentiator TD1, input the error signal e(t), and output the error tracking signal e of e(t) 1 (t) and error differential signal e 2 (t);
[0054] S3: Design the integral separation link, input the error tracking signal e 1 (t), the output integral control component u ki (t);
[0055] S4: Design the proportional link and the differential link, respectively input the error tracking signal e 1 (t) and error differential signal e 2 (t), output proportional control component u kp (t) and differenti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More