

Human-like lower limb system
A lower limb, human-like technology, applied in the field of robots, can solve the problems of poor carrying capacity, easy to get stuck, small movement space, etc., and achieve the effect of small motion error, large motion range, good flexibility and shock absorption function.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below according to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
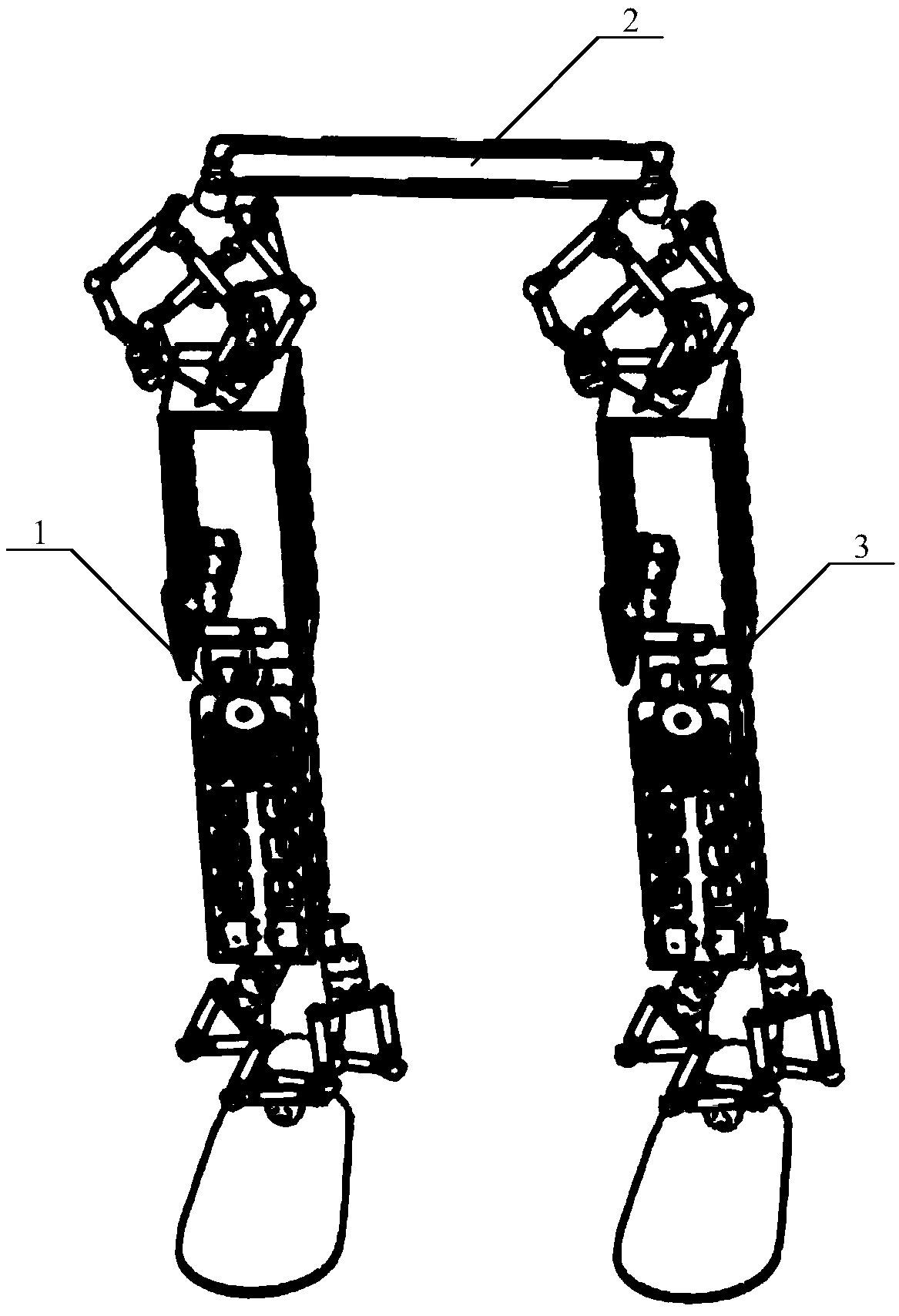
[0028] Such as Figure 1-5 As shown, a humanoid lower limb system includes two lower limb connectors 2 and lower limb one 1 and lower limb two 3 symmetrically connected to both ends of the lower limb connector one 2;
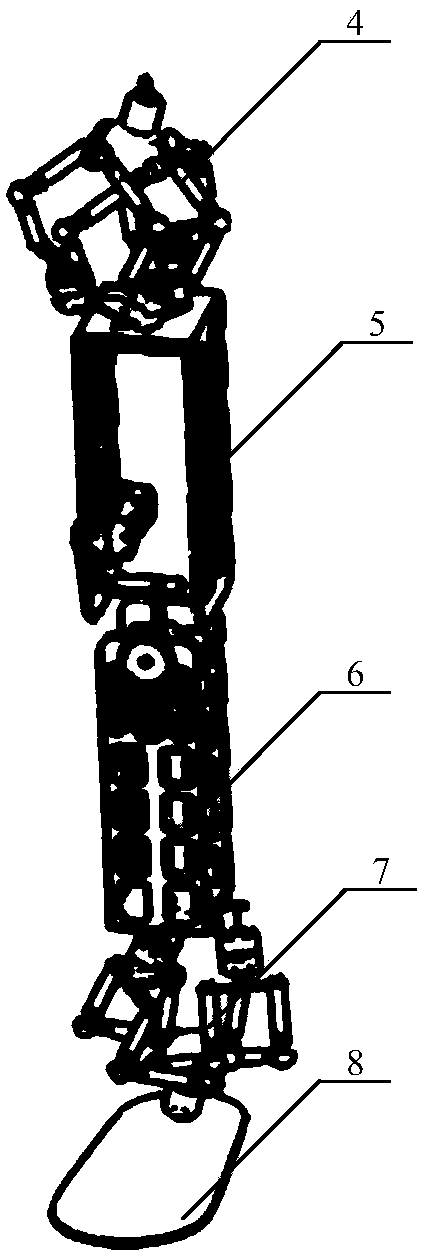
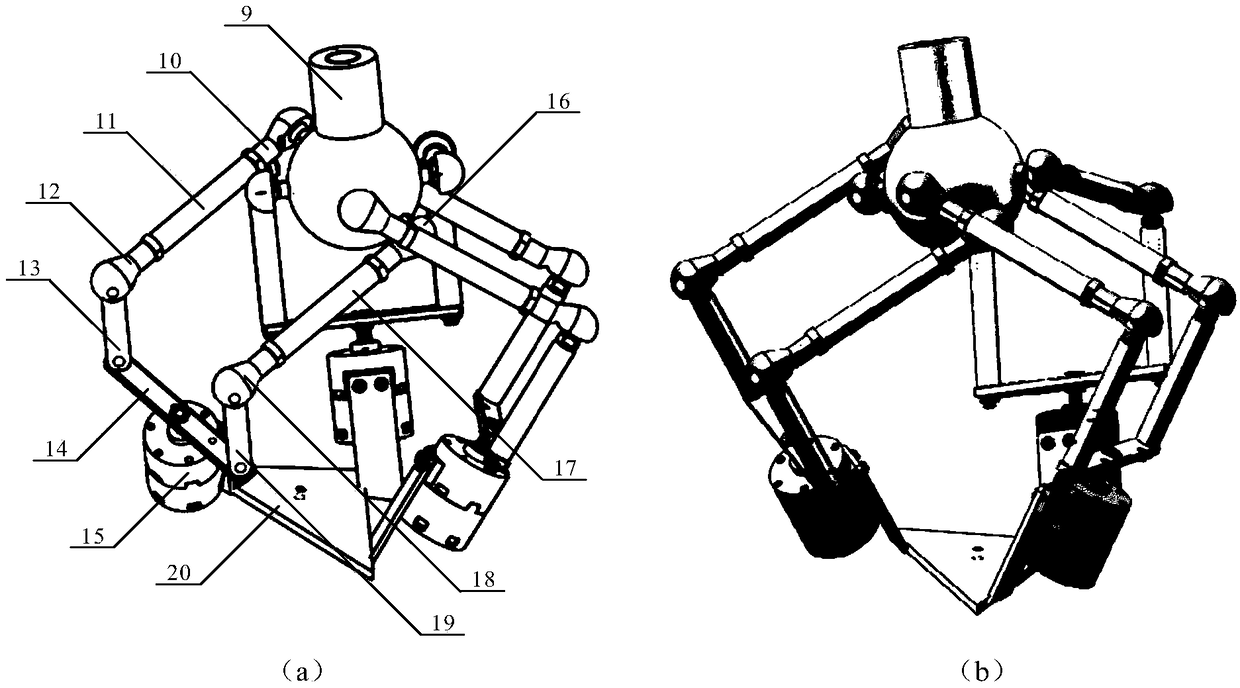
[0029] Lower limb 1 and lower limb 2 3 have the same structure, both including hip joint 4, thigh part 5, calf part 6, ankle joint 7 and foot 8, hip joint 4 includes spherical joint 9, three parallel space structures and cylinder fixing plate 20;
[0030] The spatial structure includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More