Method for dynamic reconstruction of control algorithm of industrial robot
A technology of industrial robots and control algorithms, applied in the direction of program control of manipulators, instruments, calculations, etc., can solve problems such as robot disturbance, dynamic reconfiguration method is not simple, algorithm is difficult to implement, etc., to reduce economic losses and avoid system process state Interruption and loss, reducing the effectiveness of development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
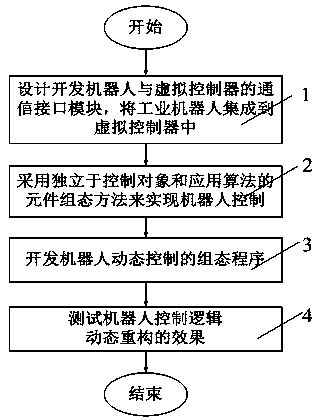
[0021] The invention provides a method for dynamic reconstruction of an industrial robot control algorithm, comprising the following steps:
[0022] Step S1: Design and develop the communication interface module between the industrial robot and the virtual controller, and integrate the industrial robot and its original controller into the virtual controller;
[0023] Step S2: Use the component configuration method independent of the control object and the application algorithm to realize the robot control; the internal packaging of each type of component has its own function function, and the connection relationship between the components corresponds to the recursive relationship of the control state, and the transfer process And the coding process of the basic control algorithm;
[0024] Step S3: Develop the dynamic control configuratio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com