

AUV cooperative navigation method of maximum correntropy adaptive cubature particle filter
A technology of collaborative navigation and particle filtering, applied in navigation computing tools and other directions, which can solve problems such as difficulty in implementation and large amount of PF calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
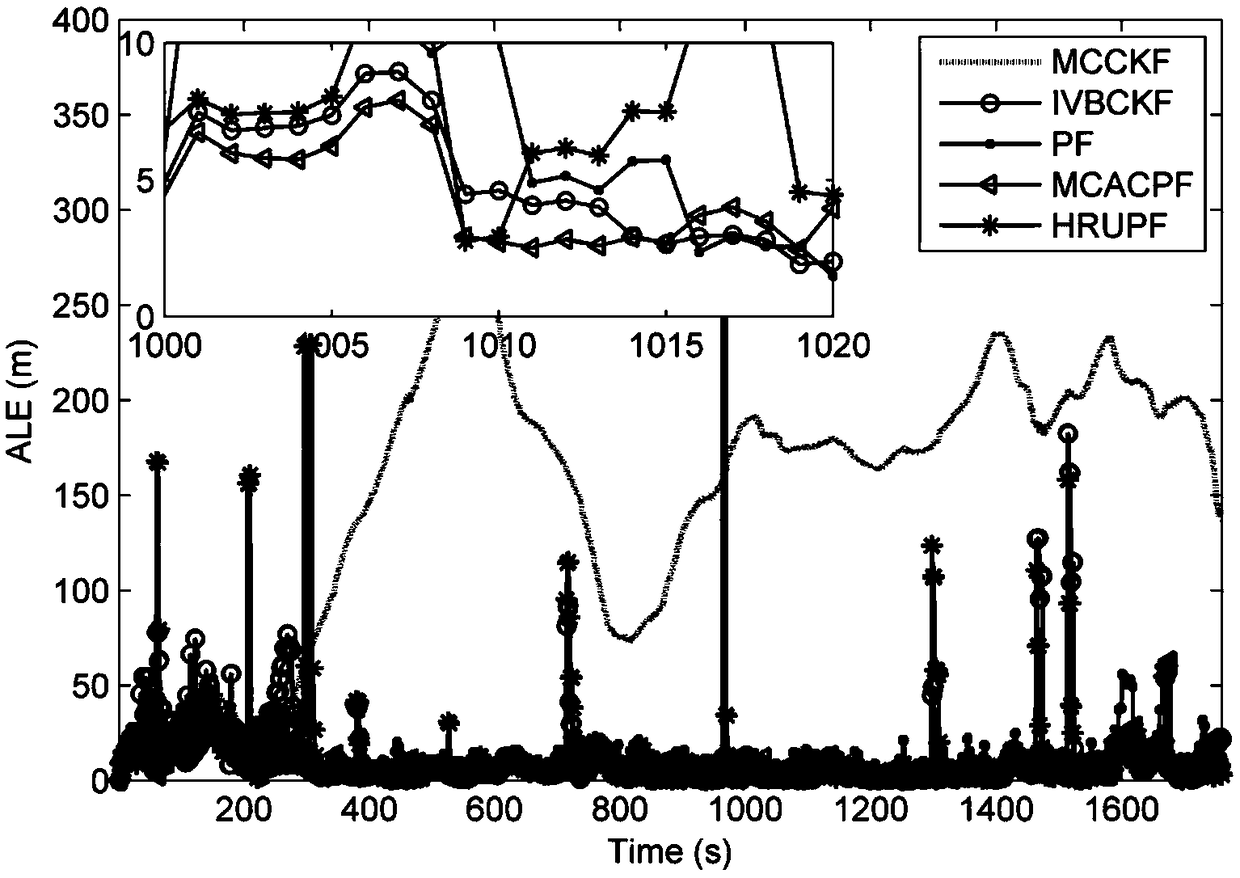
[0115] In the actual cooperative navigation, outliers often appear when measuring the speed and position, which will cause the accuracy of the traditional nonlinear filtering algorithm to decrease or even diverge. Therefore, it is necessary to use nonlinear robust filtering for outliers, usually applied The nonlinear robust filtering method based on MCCKF, HRUPF and IVBCKF is used to obtain the motion state of the target. However, in the case of outliers in the measurement noise, the above filtering method cannot meet the requirements. The MCACPF-based AUV cooperative navigation method provided by the present invention has higher robustness than the existing method, and can improve the precision of cooperative navigation under the condition that the measurement noise has outliers. The advantages of the present invention are illustrated below with specific implementation examples. combine image 3 It is a schematic diagram of the average positioning error curve of target posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More