

Active fault-tolerant predictive control method for faults of multiple actuators in discrete system
A multi-actuator, predictive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems prone to failure, high dimension of operating variables and controlled variables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further explained below in conjunction with the accompanying drawings.
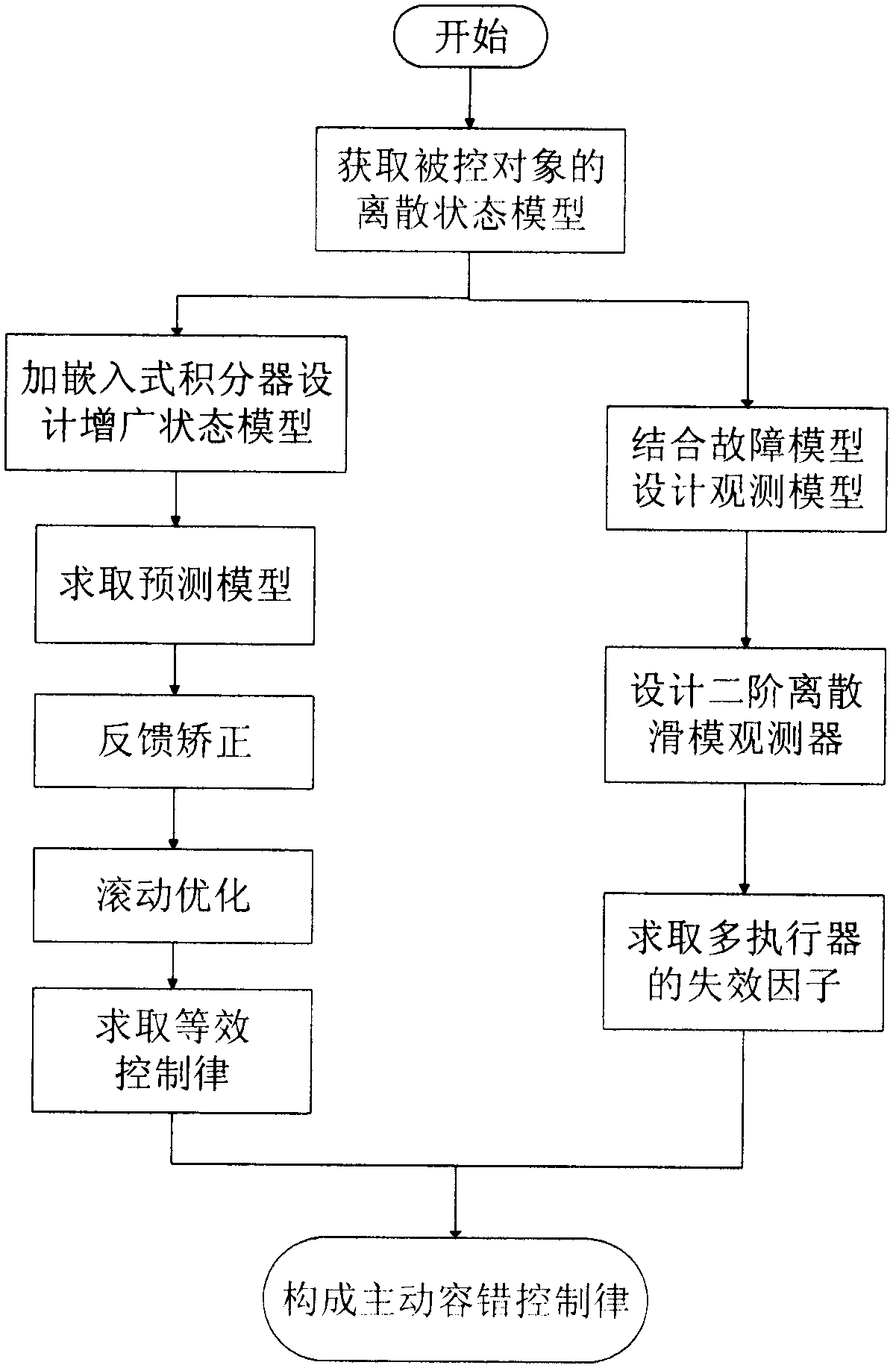
[0069] Such as figure 1 As shown, for the active fault-tolerant predictive control method for multiple actuator failures in discrete systems, when there are multiple actuator failures in the controlled system, based on the designed second-order sliding mode observer, an active fault-tolerant predictive control method is proposed, including The specific steps are as follows:
[0070] Step 1) Consider a general discrete model of the system, as shown in formula (1):
[0071]
[0072] where x 0 (k)∈R n is the state variable of the system, u(k)∈R p is the control input of the system, y(k)∈R q is the system output, A 0 , B 0 and C 0 is the corresponding coefficient matrix, d(k)=ΔAx 0 (k)+ΔBu 0 (k)+ω(k) represents the sum of system parameter uncertainty and external disturbance, ΔA and ΔB are system parameter uncertainty, ω(k) is external disturbance, and d(k) is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More