

3D scanning imaging system for unmanned aerial vehicle
A scanning imaging, unmanned aerial vehicle technology, applied in radio wave measurement system, use of re-radiation, measurement device and other directions, can solve the problems of high use cost, single detection method, inability to extract depth and far-view information, etc., to prevent information Lost, improve the efficiency of use, improve the effect of work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in further detail below in conjunction with the accompanying drawings.
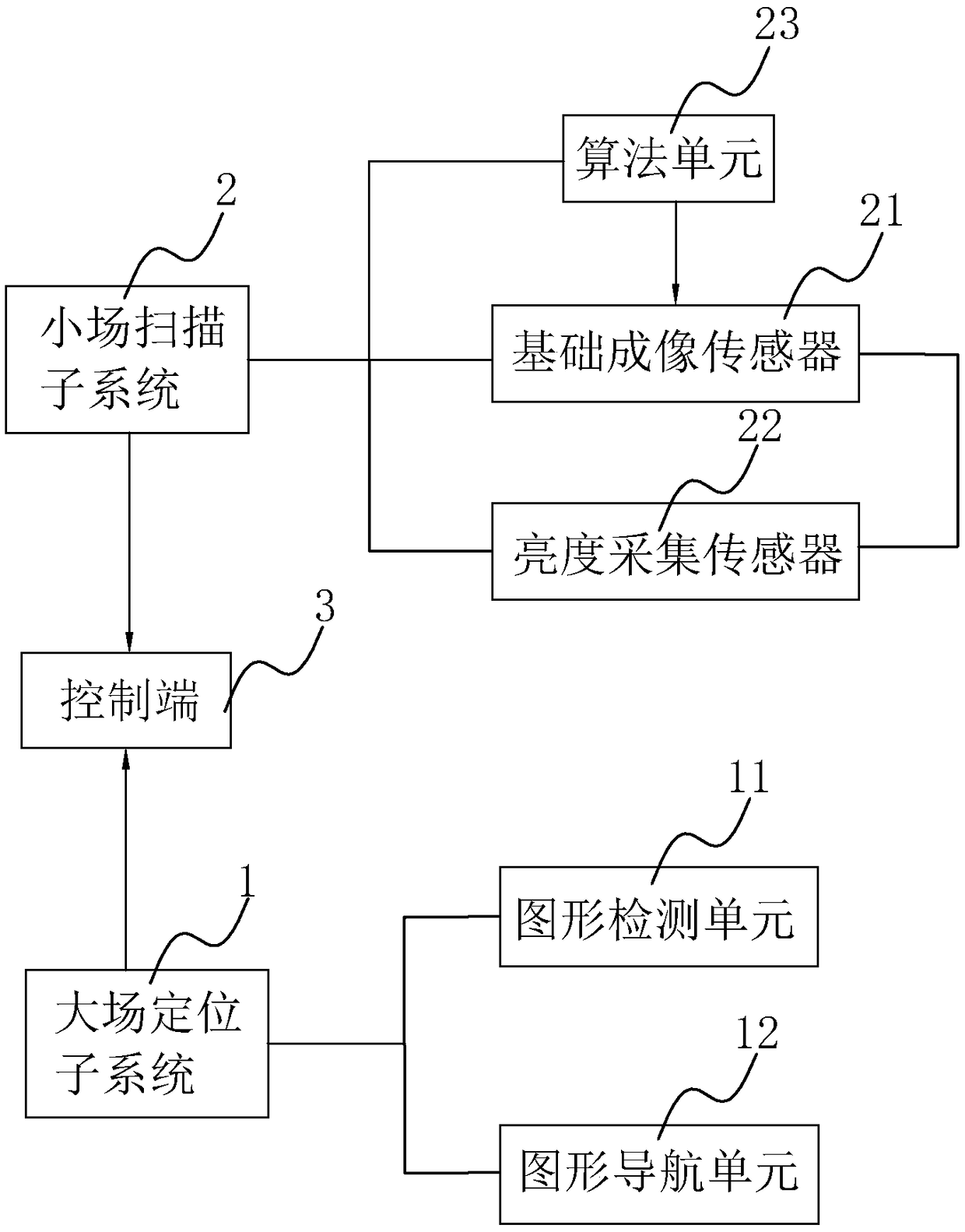
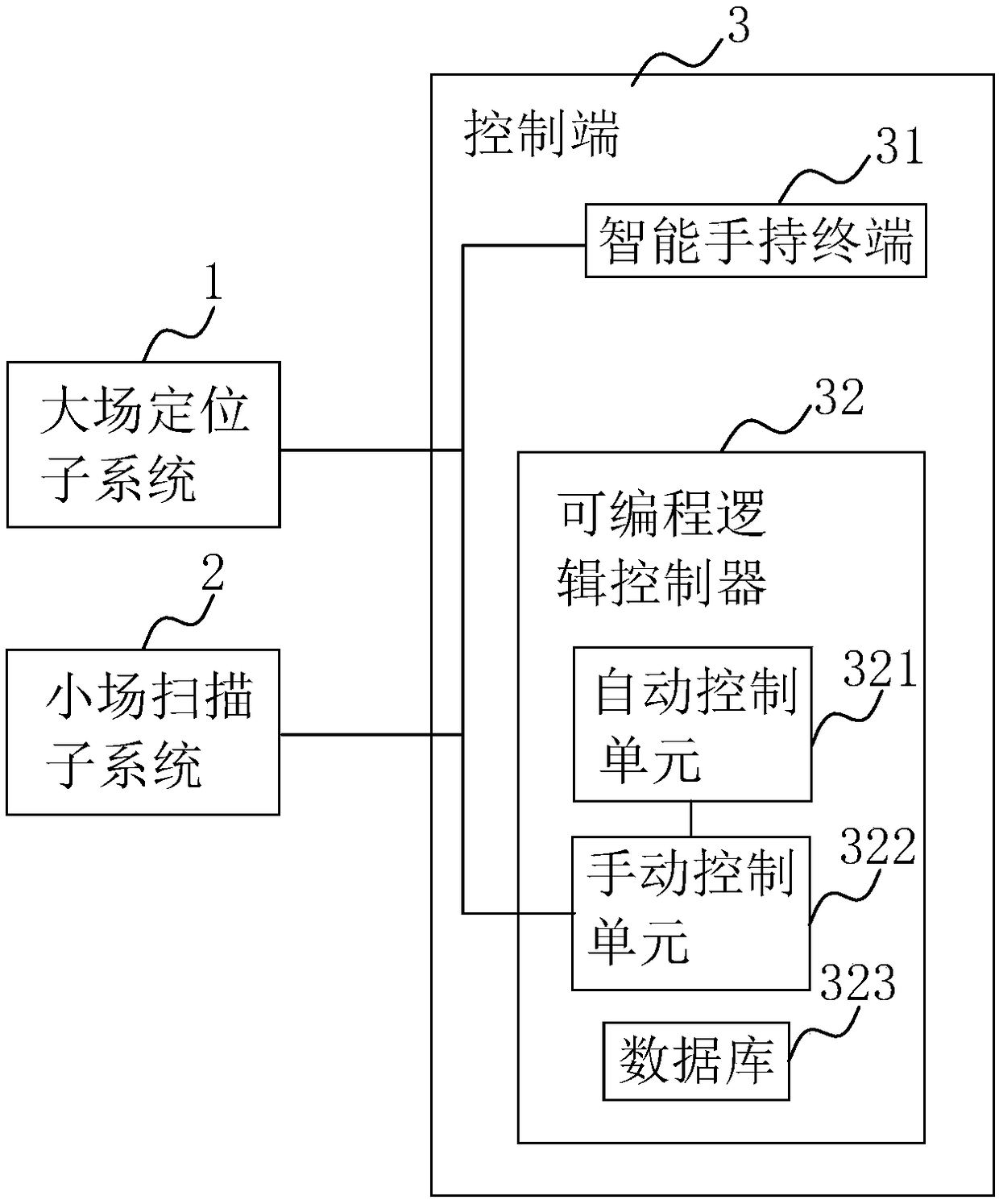
[0037] A drone 3D scanning imaging system, such as figure 1 As shown, it includes a large-field positioning subsystem 1, a small-field scanning subsystem 2 installed on the UAV, and a control terminal 3. The large-field positioning subsystem 1 and the small-field scanning subsystem collect the The data signal is sent to the control terminal 3, wherein the large-field positioning subsystem 1 can locate the UAV in real time, and the small-field scanning subsystem 2 can obtain the image parameter information of the scanned object, and then the two will collect the collected The data signal is transmitted to the control terminal 3 through the CAN bus for storage, scheduling, and processing. With the graphical and visual data display method as a reference, the specific location is located and scanned for imaging in the shortest time, improving the efficiency and e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More