

Laser SLAM (Simultaneous Localization And Mapping) algorithm based on self-adaption unscented Kalman filter
An unscented Kalman and filter algorithm technology, applied in navigation computing tools, navigation, instruments, etc., can solve problems such as unknown statistical characteristics, changes, and poor positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
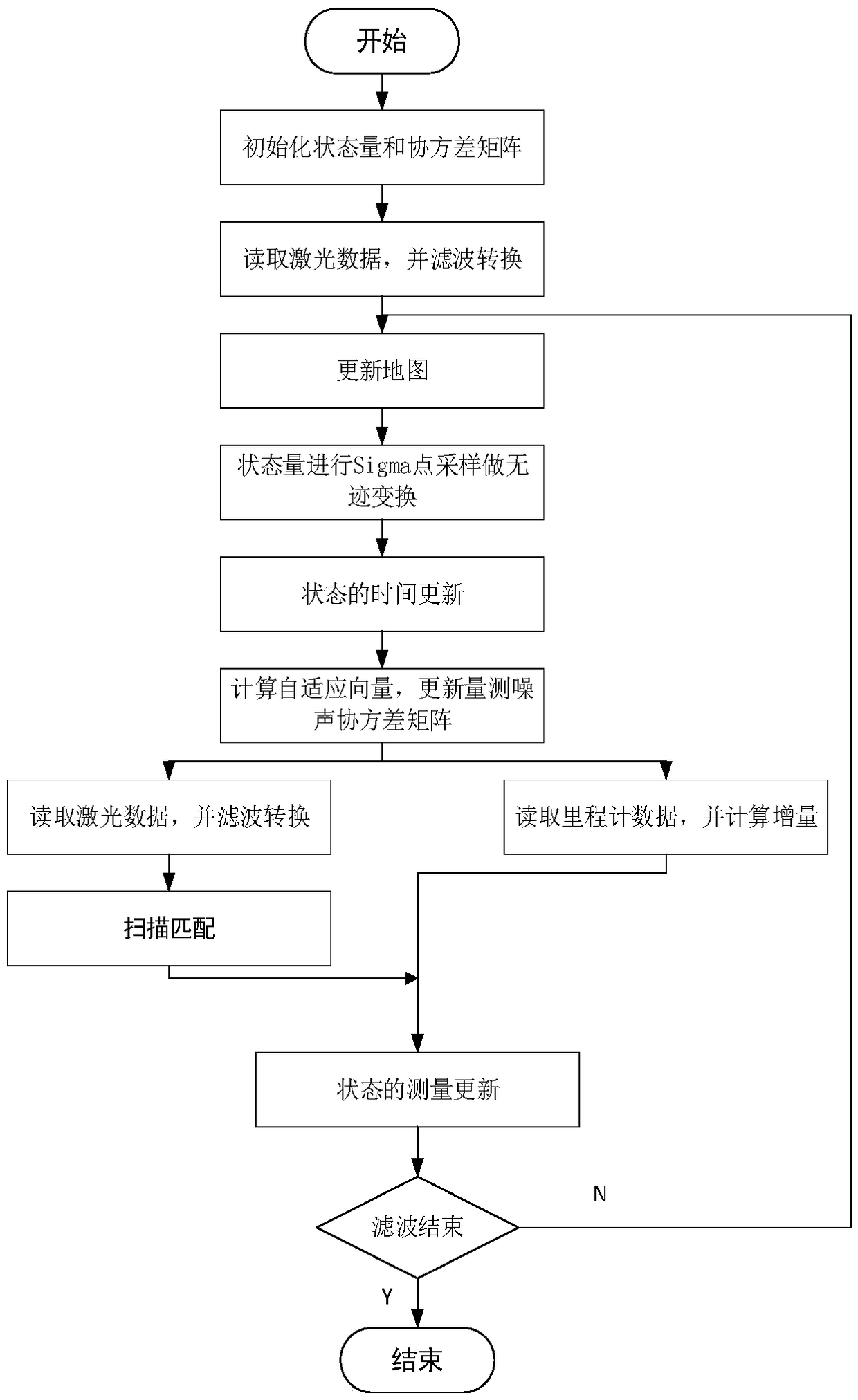
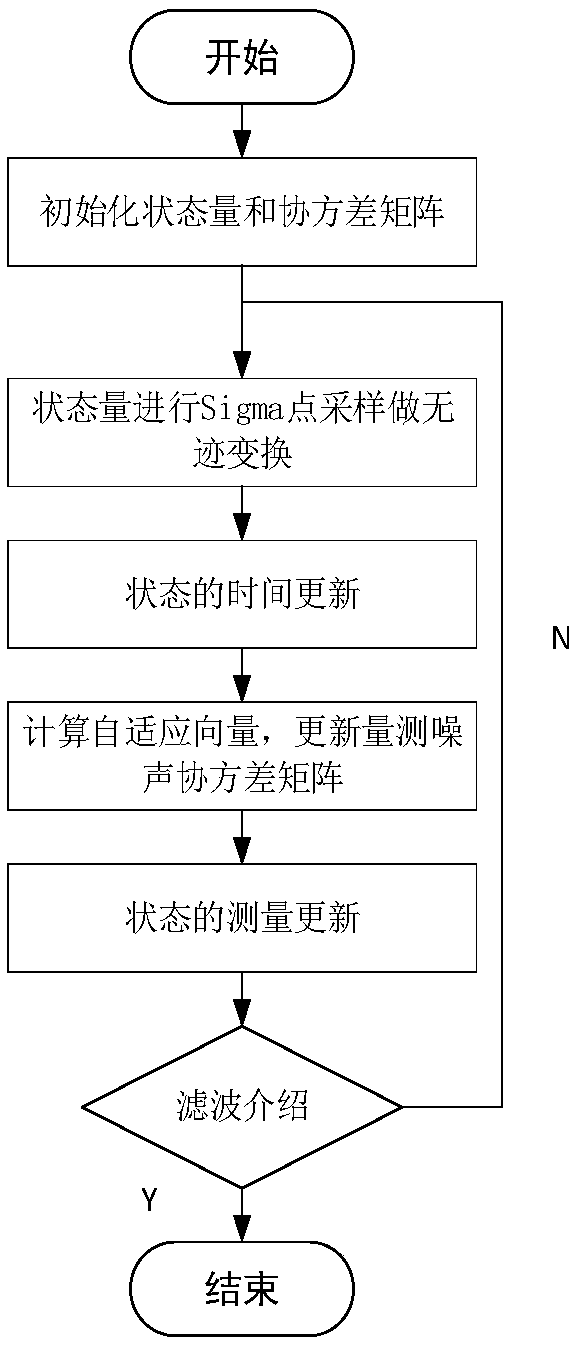
[0053] like figure 1 As shown, the present invention is based on the laser SLAM algorithm of adaptive unscented Kalman filter, comprises the following steps:
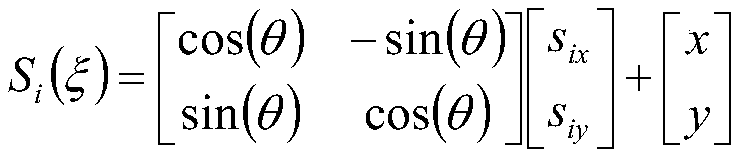
[0054] Step 1. Use the Hector SLAM algorithm to achieve positioning based on the matching optimization between the end of the laser beam and the known map, read the laser data, and then calculate the pose of the robot in the global coordinates according to the relationship between the laser sensor coordinate system and the robot coordinate system ;
[0055] Step 2. Using the unscented Kalman filter algorithm, in the nonlinear system, the laser estimated pose data and the odometer estimated pose data are fused as the actual estimated pose;
[0056] Step 3. Calculate the adaptive vector, update the measurement noise covariance matrix, and then use the adaptive unscented Kalman filter algorithm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More