

Method for instant positioning and map building based on fusion of laser and two-dimensional code
A map construction and two-dimensional code technology, which is applied in surveying and navigation, measuring devices, instruments, etc., can solve the problems of single application, positioning failure, and inability to meet the application requirements of complex environments.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to enable those skilled in the art to better understand the solutions of the present application, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application.
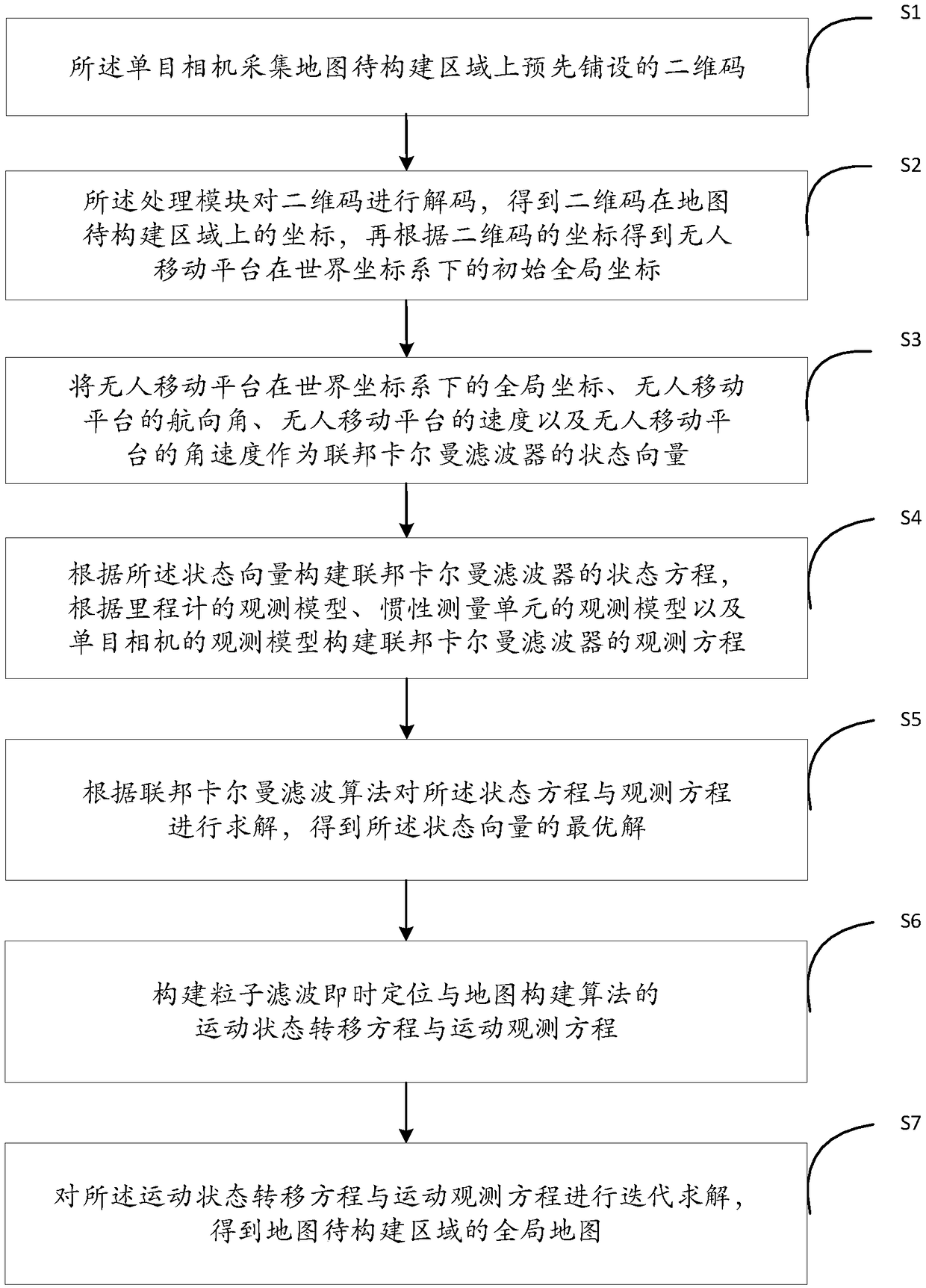
[0058] see figure 1 , which is a flowchart of a real-time location and map construction method based on laser and two-dimensional code fusion provided in this embodiment.
[0059] An instant positioning and map construction method based on laser and two-dimensional code fusion is applied to an unmanned mobile platform, and the unmanned mobile platform includes a processing module, a monocular camera, a laser radar, an odometer, and an inertial measurement unit.
[0060] Optionally, the monocular camera and lidar are installed on the front of the unmanned mobile platform, the odometer is installed on the wheels of the unmanned mobile platform, and the inertial measuremen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More