

Mechanical arm control method based on RBF neural network
A neural network and control method technology, applied in the field of robotic arm control, can solve the problem that parameters cannot be accurately predicted, and achieve the effect of being suitable for application and reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] see Figure 1 to Figure 12 Shown:
[0029] The mechanical arm control method based on RBF neural network provided by the present invention, its method is as follows:
[0030] Step 1. According to the working principle of each module of the human brain cognitive system and the mechanism of operating conditioning, a cognitive learning model mechanism of the manipulator is provided.
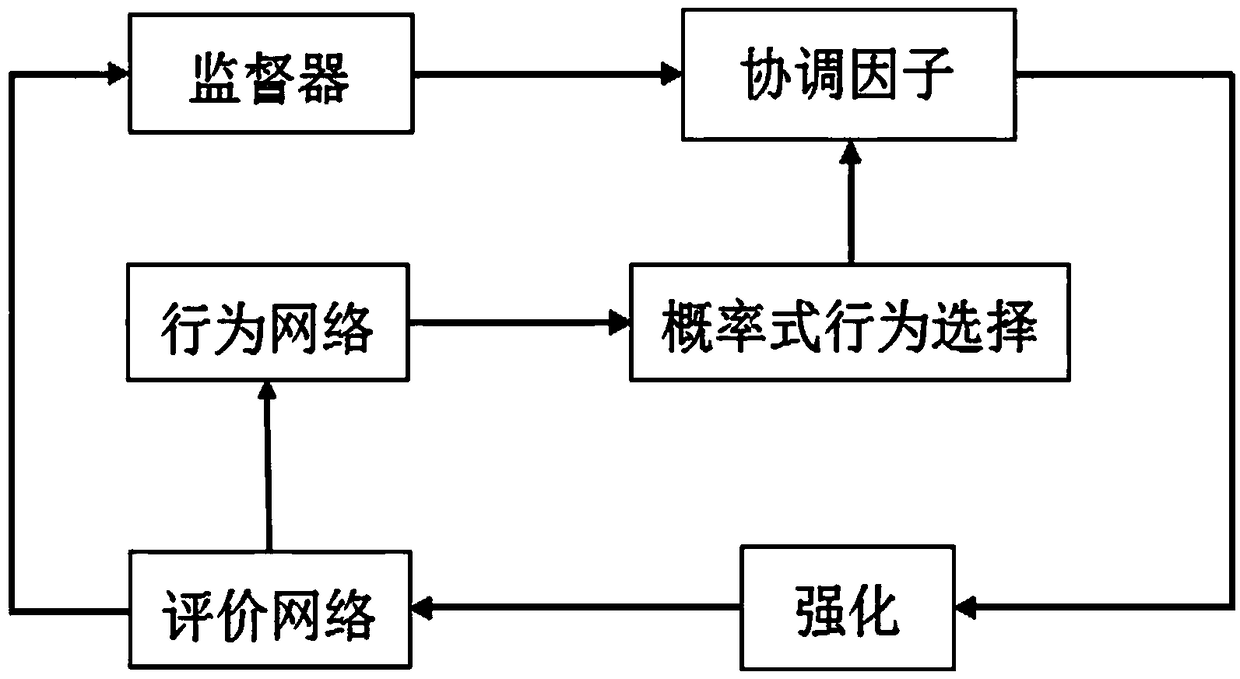
[0031] According to the working mechanism of each part of the human brain, a cognitive learning model with the cerebellum-basal ganglia operating conditioned reflex as the main learning mechanism is proposed, so that the agent system can continuously learn through the behavior network, the evaluation network and the role of the supervisor .
[0032] Such as figure 1 As shown, the behavioral network is jointly realized by the cerebellum module and the basal ganglia module, and it is a behavior of exploring the outside world, which is realized through probabilistic behavior selection. The c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More