

Auto-correcting planar gravity balancing mechanism for welding robot
A welding robot and automatic calibration technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of unable to realize grasping automatic weighing, uneven force, poor bonding strength, etc., to achieve accuracy and repeatability, Improve the effect of the difference in force and the best welding effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the drawings and specific embodiments, but it is not intended to limit the present invention.
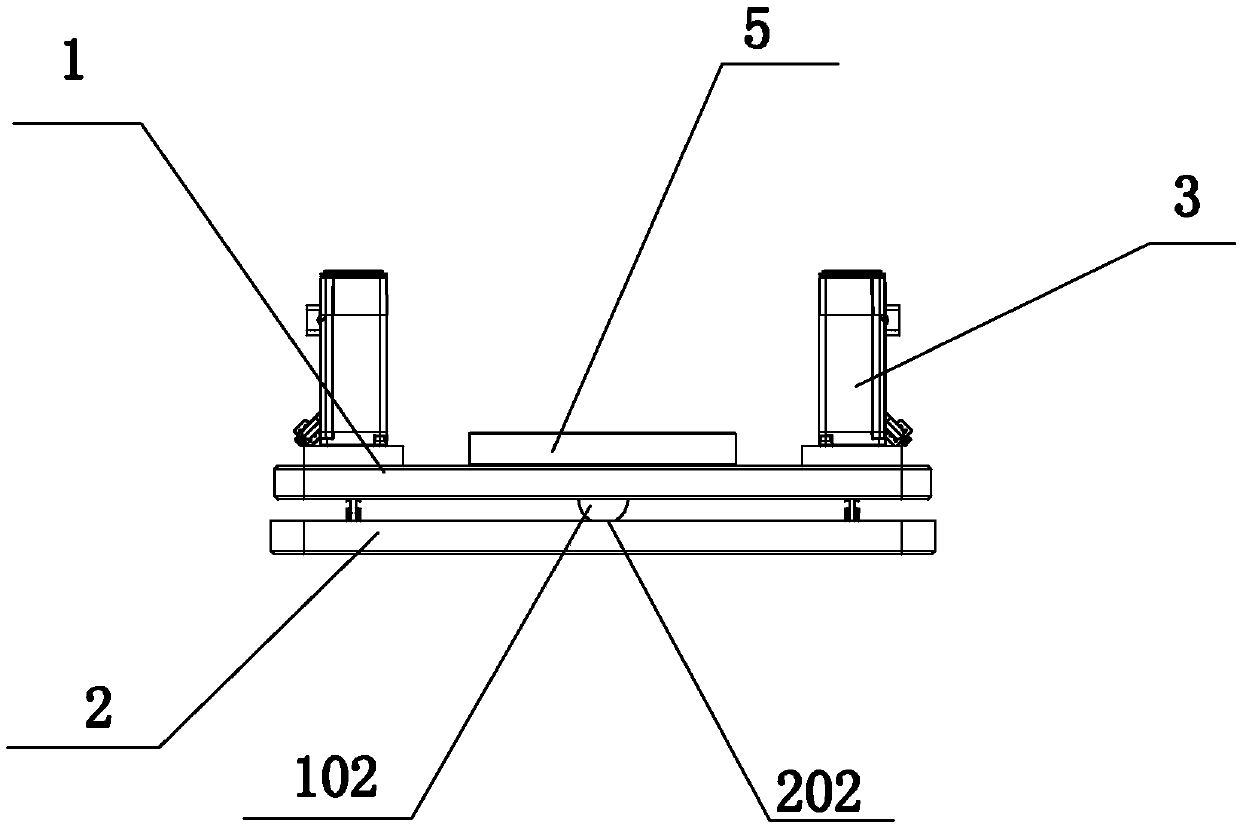
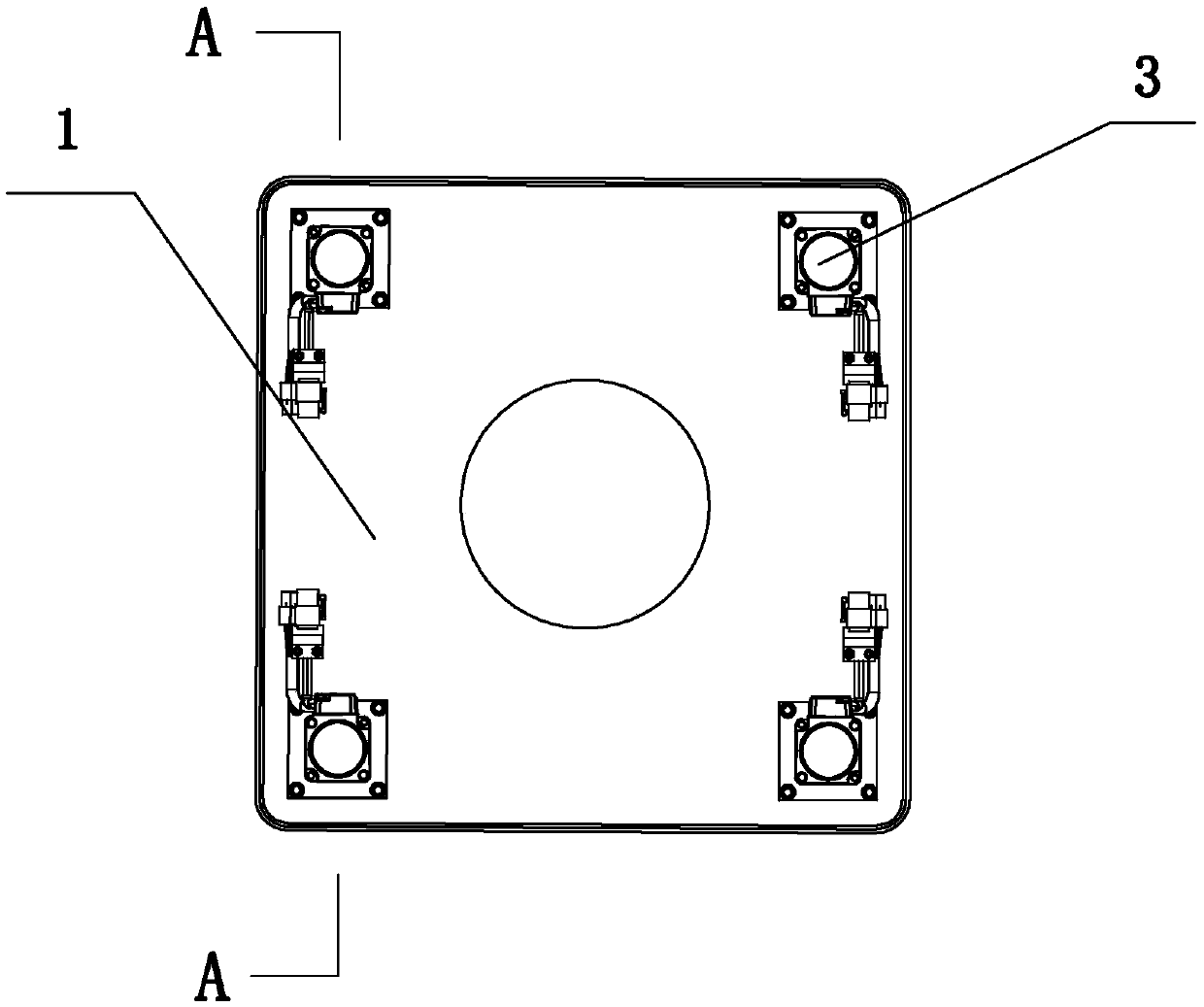
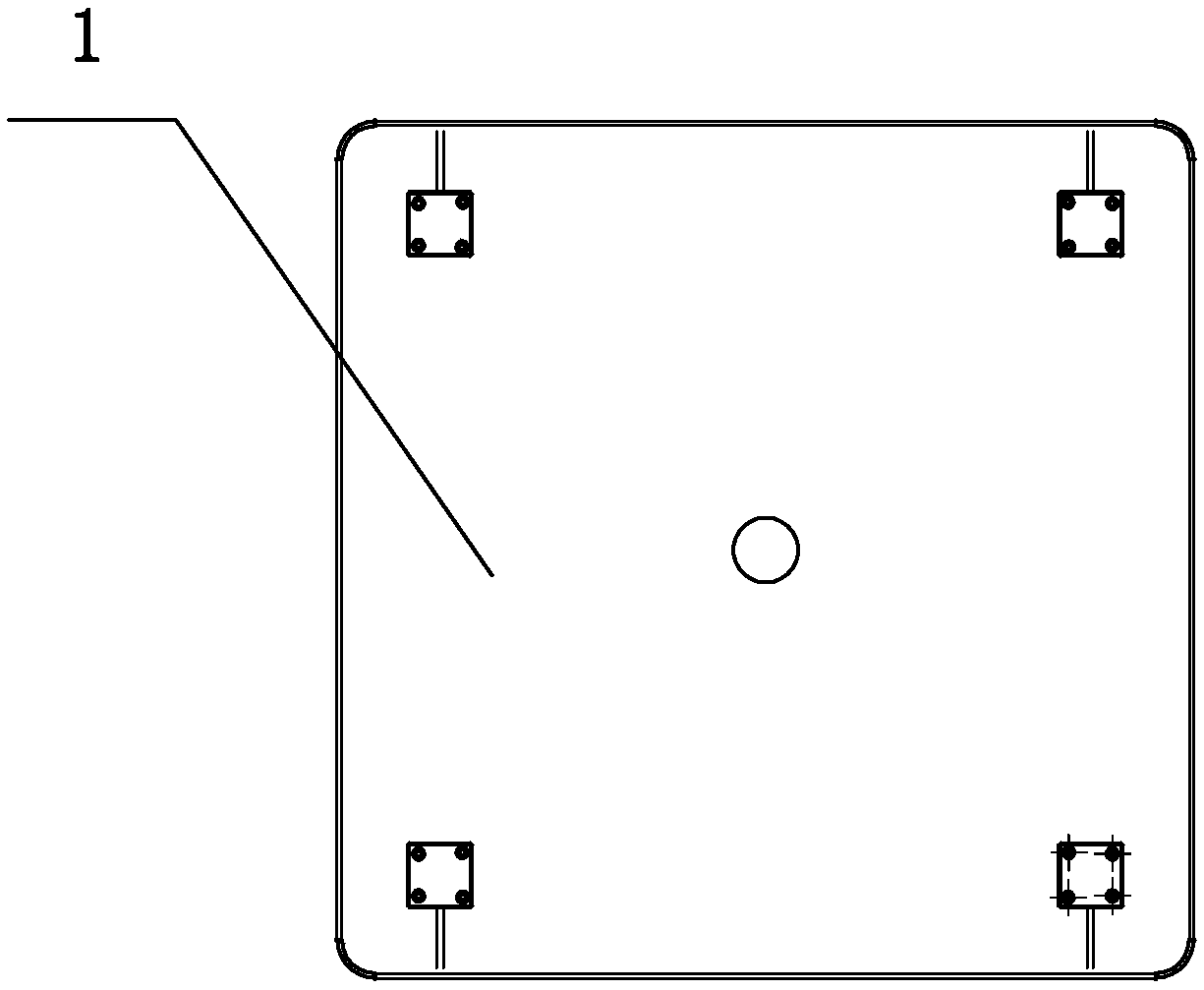
[0035] Such as Figure 1 to Figure 8 As shown, the welding robot automatically corrects the plane gravity balance mechanism and is used in conjunction with the six-axis joint robot 6;
[0036] Including balance board A 1, balance board B 2, 4 floating mechanism components 3, central decision-making control module PLC control system, said balance board A 1 and balance board B 2 are square, balance board A 1 and balance board B 2 In order to be arranged in parallel up and down, the balance plate A 1 is above the balance plate B 2, and the four corners of the balance plate A 1 are each provided with a mounting hole A 101, and the four corners of the balance plate B 2 are each provided with 1 mounting hole B 201, 4 floating mechanism components 3 are vertically arranged on the 4 corners of the balance board A 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More